導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー



生産ラインの停止を防ぐために保全作業は必要ですが、作業者の負担にもなります。特にロボットの定期的な全数点検は、対応する作業者の不足も製造業の課題になっています。今回は、ロボットやコントローラの状態を常に監視する「ロボットヘルスチェック機能」による、保全の効率化について解説します。
ロボットの保全は欠かせないが、人手不足の課題も
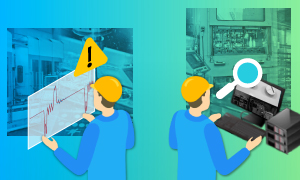
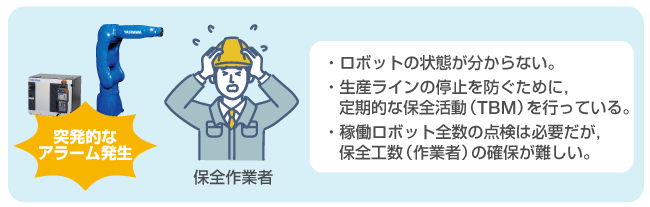
計画外の生産ラインの停止は多大な損害につながります。ロボットを導入後、生産ライン停止を未然に防ぐために現場での保全は欠かせません。ですが、ロボットに突発的なアラームが発生した場合に、ロボットの状態がすぐには分からないケースもあります。
生産ライン停止を防ぐためには、定期的な保全活動(TBM)*が有効ですが、稼働するロボット全てを点検するには、保全工数も膨らみます。作業者の確保が難しいという声も多くの現場から聞かれ、大きな課題になっています。
*時間基準保全(TBM:Time Based Maintenance):決められた周期で行う定期メンテナンス
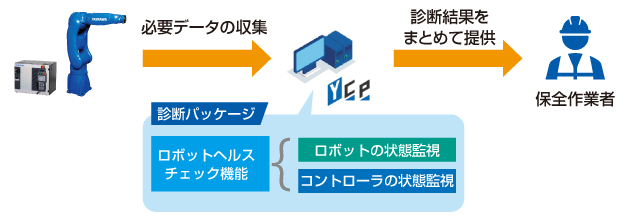
こうした課題に対し安川電機では、稼働中のロボットおよびロボットコントローラを常に一括して管理し、状態を監視する「ロボットヘルスチェック機能」をご提供しています。この機能は、生産現場のリアルタイムデータの収集・蓄積・分析を一括して行うソフトウェア「YASKAWA Cockpit(以下、YCP)」のアドオンアプリケーションの1つです。詳しく解説しましょう。
ロボットヘルスチェック機能とは?状態に合わせた点検が可能に!
YCPのロボットヘルスチェック機能は、ロボットやコントローラの状態を監視し、診断結果をまとめて保全作業者にご提供することができます。ロボットの状態が視える化されることで、万が一突発的なアラームが発生しても迅速に対応できるのは大きなメリットですよね。
また、TBMが当たり前だったロボットの保全を、“ロボットの状態に合わせた保全活動(CBM*)”に転換することで、計画的で最適な保全作業を行うことができます。さらには、突発的なトラブルを未然に防ぐことも可能になります。
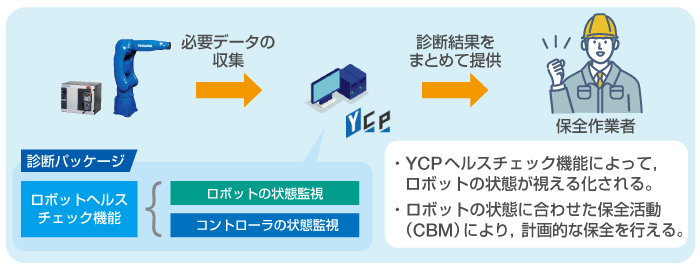
*CBM:コンディション・ベースド・メンテナンス(Condition Based Maintenance)の略で、機械の状態を監視して異常を検知したときのみ行うメンテナンス「状態基準保全」の意
ロボットヘルスチェック機能を使用するには?
ロボットヘルスチェック機能は、「YASKAWA Cockpit(以下、YCP)」のアドオンアプリケーションの一つです。このYCPに接続されたロボットおよびロボットコントローラが、ロボットヘルスチェック機能の対象となります。
ロボットヘルスチェック機能の監視項目は16項目
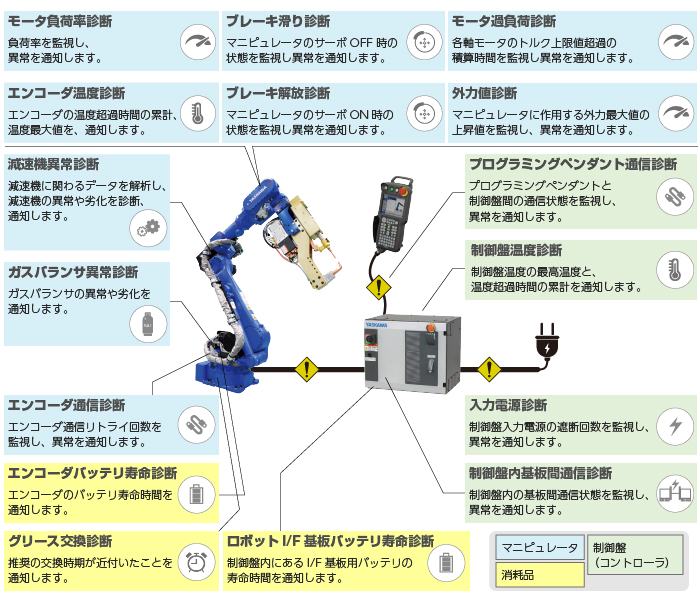
ロボットヘルスチェック機能の監視項目は全部で16項目あり、マニピュレータ、ロボットコントローラ、消耗品の状態も監視することができます。
例えば、マニピュレータの「ガスバランサ異常診断」では、ガスバランサの異常や劣化を通知します。また、「 減速機異常診断」では、減速機に関わるデータを解析し、減速機の異常や劣化を診断、通知します。
他にも、マニピュレータのモータ負荷、エンコーダやブレーキの診断、ロボットコントローラのコンバータ温度や入力電源の遮断回数、グリースの交換時期など、重要な項目を幅広く監視し状態を通知します。これらの診断結果を基に、計画的な保全に生かすことができます。
■ロボットヘルスチェック機能監視項目
ロボットの保全作業者の負荷や人手不足にお悩みの方、計画的な保全に取り組みたい方は、是非ロボットヘルスチェック機能をご検討ください。お問い合わせページからぜひお気軽にご相談ください。

解説のポイント
- 生産ライン停止を防ぐため、ロボットの定期的な全数点検は必要だが、対応する作業者の不足も製造業の課題に。
- 安川電機では、ロボットおよびロボットコントローラを常に一括して管理し、状態を監視する「ロボットヘルスチェック機能」を、YCPのアドオン機能の一つとして提供している。
- ロボットヘルスチェック機能は、マニピュレータ、ロボットコントローラ、消耗品の全16項目の状態を監視。診断結果を基に、状態に合わせた保全が可能になる。