














 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー



研磨などの特定の工程では、熟練者の高齢化や後継者不足が問題になる一方、人の滑らかな力加減や巧みな動きを数値化・プログラミング化することが難しく、ロボットによる自動化が進みづらい状況があります。今回は、人の動きをロボットに直接教え込み、熟練作業を容易にロボット化できる実演教示パッケージ「MOTOMAN-Craft(モートマンクラフト)」の特長や適用例をご紹介します。
作業者の高齢化や後継者不足だが自動化も困難・・・研磨工程の現状・課題

製造現場での人手不足が深刻な問題となる中、更なる生産性や競争力の向上に向けて産業用ロボットの活用が進んでいます。しかし、樹脂や金属面の研磨といった特定の工程においては、高いスキルを有する熟練作業者に支えられている現場が存在します。
これらの現場では作業者の高齢化が進み、後継者不足からの技能伝承や人材育成に費やす時間や費用負担などの問題が顕著になっています。
一方で、こうした熟練作業者の手技は数値化・プログラム化が困難で、ロボットへの教示や活用が難しいことも課題です。たとえ多くの時間を費やしてロボットへの教示を行っても、多品種少量に対応しづらく、結果的に人手に頼っているという現状があります。
こうした工程の問題を解決するため、安川電機では人の動きを直接ロボットへ教示できる実演教示パッケージ「MOTOMAN-Craft(モートマンクラフト)」をご提案しています。

人がお手本を示し、数値化・プログラミング化が困難な熟練作業を容易にロボット化
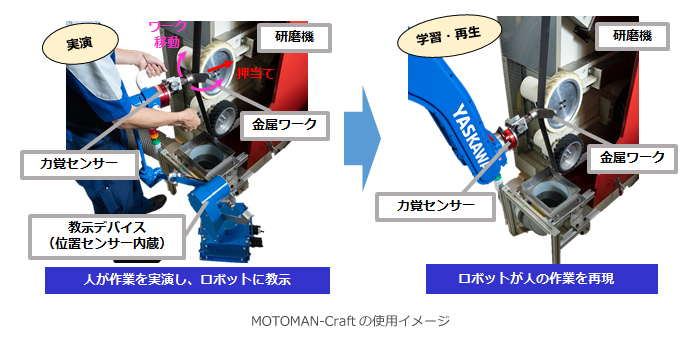
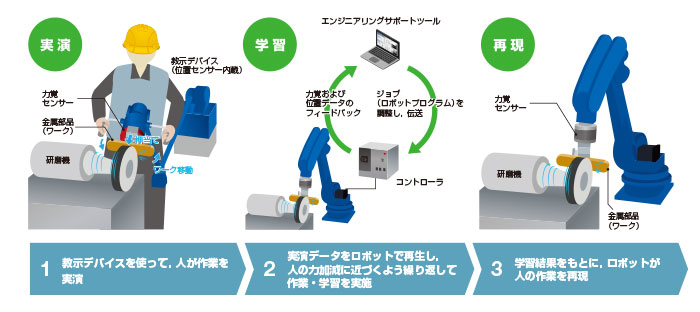
実演教示パッケージ「MOTOMAN-Craft(モートマンクラフト)」は、熟練技術者が専用教示デバイスで作業を行い、ロボットが動作できるプログラムに変換、ロボットがその作業を正確に再現する製品です。熟練作業を自動化する際に課題となっていた、ロボットへの教示に伴う負担を軽減し、システム立上げに要する時間を大幅に削減できるメリットがあります。

MOTOMAN-Craft(モートマンクラフト)の適用事例
一般的なロボット動作の入力装置(プログラミングペンダント)では、研磨など熟練の技を必要とする複雑な接触作業の教示は困難で、多くの時間がかかります。そこでMOTOMAN-Craft(モートマンクラフト)を使用すれば、熟練作業者の高度なスキルを自動化でき、生産性向上に貢献します。実演データを複製し、異なるロボットで使用することも可能です。
動画で実際の動きを見る
MOTOMAN-Craft(モートマンクラフト)の仕組み、機能の紹介
ここからは、MOTOMAN-Craft(モートマンクラフト)の仕組みや機能の詳細をご紹介します。
1.人の動きを数値化しプログラムを自動生成
通常、ロボットに動きを教えるには、プログラミングペンダントを使用して、動作命令、数値による位置情報を入力しプログラムを作成する必要があります。簡単な幾何学形状のプログラムは容易でも、滑らかな自由曲線動作のプログラムには、多くの動作命令や位置情報が必要で、動作命令間のつなぎが滑らかになるような処置にも時間を要します。
そこで、人の動きをセンシングする専用教示デバイスの操作により、位置情報や力覚情報を取り込んで数値化し、プログラムを自動生成します。専用教示デバイスを使用した実演による教示であれば、研磨のようなワークの曲面形状に合わせた3次元的な軌道と力加減を短時間で簡単にプログラム化することが可能です。
2.学習による位置データ・力覚データの自動修正
専用教示デバイスを用いて自動生成されたプログラム上のワーク位置と、実際にロボットの先端に把持されたワーク位置とでは、微妙なずれが発生するため、人が教示したときに比べ、ロボットが受ける力が変わってきます。そこでロボットが作業を繰り返すなかで学習し、教示時の力覚データとロボットが実際に受ける力の誤差が小さくなるように自動で修正し力加減を調整します。さらに、動きの変化が大きい箇所では位置データを細かく設定し、変化の小さい箇所では位置データを大まかに設定することで、生成プログラムの簡素化、データ量削減を行いプログラムの最適化を自動で行います。
3.アプローチ動作最短化機能
人が専用教示デバイスを用いて教示を行う際、スタート位置から実作業を行う領域まで動かす経路において、前後左右に調整しながら最終的な作業開始位置や姿勢を探りながら接近する動作が発生します。これらの事前動作は、生産を開始してからは非効率で不要な動作となります。
本機能では、不要な事前動作をプログラムから削除し、スタート地点から最終的な作業開始位置・姿勢までを最短の経路で移動させることができます。
後継者不足や人材育成にお困りの方、自動化をご検討中の方、製品や適用例について詳しく知りたい方など、お問い合わせページからぜひお気軽にご相談ください。

解説のポイント
- 研磨などの工程では、高いスキルを有する熟練作業者に支えられているが、後継者不足からの技能伝承や人材育成に費やす時間や費用負担などの問題が顕著に
- 熟練作業者の手技の数値化・プログラミング化が困難で、ロボットへの教示や活用が難しく、自動化が進みづらい
- 安川電機では、人の動きを直接ロボットへ教示できる実演教示パッケージ「MOTOMAN-Craft(モートマンクラフト)」を提案している


