導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー



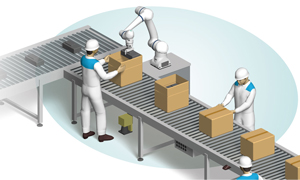
いわゆる重筋作業は作業者の負担が大きく自動化が求められる一方、多様なワークに柔軟に対応する必要もあり人手に頼っている状況があるようですね。今回は、ロボットと人の“協働運転”による、新しい自動化の方法を解説しましょう。
ロボットを直接・安全に操作する ― ハンドガイド機能とは?

大きく重量のあるワークを扱うことのある取付け、取り出し、組み付け、パレタイズなどの重筋作業。重筋作業の工程とその自動化には、以下の相反する課題が存在しています。
- 作業者の負担が大きいため自動化が必要
- 状況変化に柔軟に対応する必要があり、人手に頼らざるをえない
つまり、ロボットによる自動化と人による柔軟な作業の両立が難しいということです。
この課題を解決する方法として注目したいのが、安川電機のハンドガイド機能です。ハンドガイド機能は、一般産業用ロボットにハンドガイド装置を搭載することで作業者がロボットを直接・安全に操作できる機能です。
特長を詳しく見てみましょう。
①直感的にロボットを操作できる

最大の特長は、作業者がハンドガイド装置で作業途中に直接、直感的にロボットを操作できることです。ロボットの手先を人の手で動かして位置を調整するため、高度なセンサやカメラを用いた位置決めの仕組みなどが不要になります。
また、装置の操作ハンドルの太さや形状は人間工学に基づいて設計され、作業者の操作性を向上させています。これが認められ、2019年度のグッドデザイン賞を受賞しています。
②協働運転のための安全性への配慮
作業者とロボットの距離が近くなるため、安全性にも配慮しています。
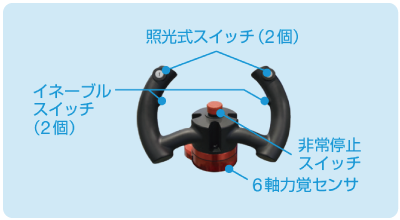
ハンドガイド装置には、3ポジションイネーブルスイッチと非常停止スイッチを搭載。速度制限機能(機能安全)によりTCP*1 速度を安全な速度に制限しています。
また、存在検知センサを用いることで、ロボットの動作領域に作業者がいないことを確認して自動運転を行うといったシステムにすることもでき、安全柵なしで運用することも可能です。
*1:ツールセンターポイント。ロボットの先端に取り付けられたツールの可動部分などに設定された一点(動作点)。
③どのロボットにも搭載可能
ハンドガイド機能は、リスクアセスメントを実施することで、どの6軸多関節ロボットにも搭載することができます。*2
*2:ロボットコントローラがYRC1000/DX200の機種のみ搭載可能です。
このハンドガイド機能によってロボットと人との“協働運転”が可能となり、作業者の負担を軽減しながら、状況の変化にも効率的かつ柔軟に対応できるようになるのです。
ハンドガイド機能による自動化の事例
ハンドガイド機能は、カメラやセンサの導入が難しい環境でも比較的導入が容易で、作業対象の変更にも柔軟に対応しやすいことから、自動化が進みにくい農業分野や小規模な製造業などに適しています。
ここからは、その自動化の事例を紹介します。
◆重量物搬送作業のアシスト
ハンドクレーンを使用した重量物(粉体・液体)の搬送作業を、ハンドガイドを搭載したロボットとの協働作業に置き換えます。

- ①ロボットがワークの位置付近に移動します。
- ②ワークの位置付近に到着後、作業者がハンドガイド装置でロボットを操作し、ワークを取り出します。
- ③ワークを取り出した後、ロボットが自動で移動しワークを搬送します。
*3:自動搬送中はロボットの動作領域に作業者がいないことを存在検知センサで監視することで、最大速度で稼働が可能です。
*4:ロボットの動作領域外での作業が可能です。
実際に操作している様子を動画で見てみましょう。
▼動画を見る(デモンストレーションは01:03頃~)

センサやカメラなしでワークを取り出しでき、作業者がロボットを直感的に操作しているのが分かりますよね。
ロボットによる効率化と人手作業の柔軟性が両立されています。
ハンドガイド機能によって作業者は重量物の搬送作業の負担から解放され、人手による搬送時間の大幅な削減にも貢献します。また、ロボットの搬送中、作業者はロボットの動作領域外で他の作業ができ、生産性向上にもつながります。
ニーズに応じた機能を搭載
ハンドガイド機能には、細かい位置決めのときに速度を遅くする「速度切替機能」、ワークとロボットの衝突を防ぐ「動作領域制限機能」など、ニーズに応じた機能を搭載しています。
ロボットと人が協働運転する、新しい自動化の形。重筋作業の自動化をご検討の際は、ぜひお気軽にお問い合わせくださいね。

解説のポイント
- 重筋作業は、自動化と柔軟性の両立が難しい
- 安川電機のハンドガイド機能は、ロボットに搭載したハンドガイド装置を作業者が操作することでロボットを直感的に操作できる
- 作業者の負担を軽減しながら、効率的かつ柔軟な対応が可能に。搬送時間を大幅に削減でき、生産性向上にもつながる