Σ-XгӮ·гғӘгғјгӮә
гғҖгӮӨгғ¬гӮҜгғҲгғүгғ©гӮӨгғ–
SGM7DгғўгғҮгғ«гҖҖе®ҡж јгғ»д»•ж§ҳ
SGM7D-□□FгҖҒ-□□GгҖҒ-□□H
| йӣ»ең§ |
200 V |
| еҪўејҸ SGM7D- |
30F |
58F |
90F |
1AF |
01G |
05G |
08G |
18G |
24G |
34G |
45G |
03H |
| е®ҡж јеҮәеҠӣ |
W |
188 |
364 |
565 |
691 |
16 |
63 |
101 |
226 |
302 |
320 |
565 |
38 |
| е®ҡж јгғҲгғ«гӮҜ ∗1 |
N·m |
30.0 |
58.0 |
90.0 |
110 |
1.30 |
5.00 |
8.00 |
18.0 |
24.0 |
34.0 |
45.0 |
3.00 |
| еҸҚеҫ©е®ҡж јгғҲгғ«гӮҜ∗2 |
N·m |
вҖ“ |
вҖ“ |
вҖ“ |
вҖ“ |
вҖ“ |
вҖ“ |
вҖ“ |
вҖ“ |
27.0 |
40.0 |
52.0 |
вҖ“ |
| зһ¬жҷӮжңҖеӨ§гғҲгғ«гӮҜ |
N·m |
50.0 |
100 |
150 |
200 |
4.00 |
6.00 |
15.0 |
30.0 |
45.0 |
60.0 |
75.0 |
4.00 |
| гӮ№гғҲгғјгғ«гғҲгғ«гӮҜ |
N·m |
30.0 |
58.0 |
90.0 |
110 |
1.30 |
5.00 |
8.00 |
18.0 |
24.0 |
34.0 |
45.0 |
3.00 |
| е®ҡж јйӣ»жөҒ |
Arms |
5.7 |
6.4 |
5.9 |
5.0 |
1.7 |
1.6 |
3.4 |
3.4 |
3.1 |
3.3 |
4.8 |
1.1 |
| зһ¬жҷӮжңҖеӨ§йӣ»жөҒ |
Arms |
14.1 |
4.2 |
3.5 |
10.6 |
3.5 |
| е®ҡж јеӣһи»ўйҖҹеәҰ |
min-1 |
60 |
120 |
90 |
120 |
120 |
| жңҖй«ҳеӣһи»ўйҖҹеәҰ |
min-1 |
72 |
150 |
144 |
150 |
| гғҲгғ«гӮҜе®ҡж•° |
N·m/
Arms |
6.25 |
12.5 |
17.8 |
24.5 |
1.09 |
3.84 |
2.82 |
5.76 |
8.57 |
11.2 |
10.2 |
3.01 |
| еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲ |
×10-4
kg·m2 |
960 |
1190 |
1420 |
1670 |
55.0 |
75.0 |
120 |
150 |
190 |
230 |
270 |
25.0 |
| е®ҡж јгғ‘гғҜгғјгғ¬гғјгғҲ |
kW/s |
9.38 |
28.3 |
57.0 |
72.5 |
0.307 |
3.33 |
5.33 |
21.6 |
30.3 |
50.3 |
75.0 |
3.60 |
| е®ҡж ји§’еҠ йҖҹеәҰ |
rad/s2 |
313 |
487 |
634 |
659 |
236 |
667 |
667 |
1200 |
1260 |
1480 |
1670 |
1200 |
| гғ’гғјгғҲгӮ·гғігӮҜгӮөгӮӨгӮә |
mm |
550 × 550 × 30 (гӮўгғ«гғҹиЈҪ) |
350 ×
350 ×
20
(йү„иЈҪ) |
иЁұе®№иІ иҚ·ж…ЈжҖ§гғўгғјгғЎгғігғҲ
(еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲгҒ®еҖҚзҺҮ) |
еҖҚ |
200 |
150 |
150 |
130 |
130 |
300 |
400 |
350 |
300 |
250 |
200 |
600 |
| |
еӣһз”ҹжҠөжҠ—еӨ–д»ҳгҒ‘гҒ®е ҙеҗҲ |
еҖҚ |
2500 |
3500 |
4000 |
5000 |
130 |
300 |
2000 |
3000 |
4000 |
4000 |
4000 |
600 |
| иЁұе®№ иҚ·йҮҚ ∗3 |
иЁұе®№ гӮ№гғ©гӮ№гғҲ иҚ·йҮҚ |
жӯЈ |
N |
4 × 104 |
50 |
200 |
3 × 104 |
50 |
| йҖҶ |
N |
2 × 104 |
50 |
200 |
1 × 104 |
50 |
| иЁұе®№гғўгғјгғЎгғігғҲ иҚ·йҮҚ |
N·m |
400 |
вҖ“ |
50 |
200 |
вҖ“ |
| еүӣжҖ§ |
гӮ№гғ©гӮ№гғҲ еӨүдҪҚеүӣжҖ§ |
жӯЈ |
mm/
N |
2 × 10-6 |
вҖ“ |
2.5 × 10-6 |
вҖ“ |
| йҖҶ |
mm/
N |
3 × 10-6 |
вҖ“ |
3 × 10-6 |
вҖ“ |
| гғўгғјгғЎгғігғҲеӨүдҪҚ еүӣжҖ§ |
rad/
N·m |
4 × 10-7 |
вҖ“ |
1 × 10-6 |
вҖ“ |
- ∗1
- е®ҡж јгғҲгғ«гӮҜгҒҜиЎЁиЁҳеҜёжі•гҒ®гӮўгғ«гғҹиЈҪгҒҫгҒҹгҒҜйү„иЈҪгғ’гғјгғҲгӮ·гғігӮҜгҒ«еҸ–гӮҠд»ҳгҒ‘гҒҹе ҙеҗҲгҒ®дҪҝз”Ёе‘ЁеӣІжё©еәҰ40°C гҒ§гҒ®йҖЈз¶ҡиЁұе®№гғҲгғ«гӮҜеҖӨгӮ’зӨәгҒ—гҒҫгҒҷгҖӮ
- ∗2
- еҸҚеҫ©е®ҡж јгғҲгғ«гӮҜгҒҜ60%ED жҷӮгҒ®еҖӨгҒ§гҒҷгҖӮ
- ∗3
-
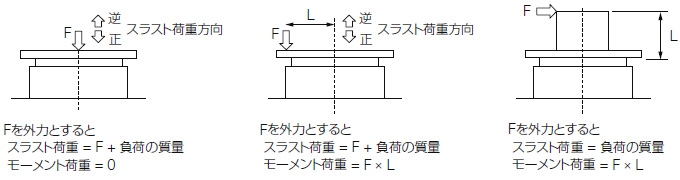
гӮөгғјгғңгғўгғјгӮҝгҒ®йҒӢи»ўдёӯгҒ«еҠ гӮҸгӮӢгӮ№гғ©гӮ№гғҲиҚ·йҮҚгҖҒгғўгғјгғЎгғігғҲиҚ·йҮҚгҒҜгҖҒдёӢеӣігҒ®гғ‘гӮҝгғјгғігҒ«д»ЈиЎЁгҒ•гӮҢгҒҫгҒҷгҖӮ
иЎЁдёӯгҒ®еҖӨгӮ’и¶…гҒҲгҒӘгҒ„гӮҲгҒҶгҒ«ж©ҹжў°гҒ®иЁӯиЁҲгӮ’иЎҢгҒЈгҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
иЁұе®№иҚ·йҮҚгҒҜдёҖж–№еҗ‘гҒ®йқҷзҡ„иҚ·йҮҚгҒ«еҜҫгҒҷгӮӢгӮӮгҒ®гҒ§гҒҷгҖӮ
иЁӯиЁҲжҷӮгҒ®иЁұе®№иҚ·йҮҚгҒҜгҖҒиҚ·йҮҚгҒ®зЁӢеәҰгҒ«гӮҲгӮҠдёӢиЁҳгҒ®е®үе…ЁдҝӮж•°гӮ’д№—гҒҳгҒҹеҖӨгҒЁгҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
| · иЎқж’ғгҒ®гҒӘгҒ„еҶҶж»‘гҒӘйҒӢи»ў |
1/3 |
| · и»ҪеәҰгҒ®з№°гӮҠиҝ”гҒ—иҚ·йҮҚ |
1/5 |
| · иЎқж’ғиҚ·йҮҚ |
1/10 |
- (жіЁ)
-
- гӮөгғјгғңгғ‘гғғгӮҜгҒЁзө„гҒҝеҗҲгӮҸгҒӣгҒҰйҒӢи»ўгҒ—гҖҒйӣ»ж©ҹеӯҗе·»з·ҡжё©еәҰгҒҢ20°CгҒ®гҒЁгҒҚгҒ®еҖӨгҒ§гҒҷгҖӮгҒҫгҒҹгҖҒеҗ„еҖӨгҒҜд»ЈиЎЁеҖӨгҒ§гҒҷгҖӮ
- жң¬гӮөгғјгғңгғўгғјгӮҝгҒ«дҪҝз”ЁгҒ—гҒҰгҒ„гӮӢи»ёеҸ—гҒҜгҖҒи»ёеҸ—гҒ®жё©еәҰгҒ«гӮҲгҒЈгҒҰжҗҚеӨұгҒ«еӨүеӢ•гҒҢгҒӮгӮҠгҒҫгҒҷ (и»ёеҸ—гҒ®жҗҚеӨұгҒҜгҖҒдҪҺжё©жҷӮгҒ«й«ҳгҒҸгҒӘгӮҠгҒҫгҒҷ) гҖӮ

SGM7D-□□IгҖҒ-□□J
| йӣ»ең§ |
200 V |
| еҪўејҸ SGM7D- |
28I |
70I |
1ZI |
1CI |
2BI |
2DI |
06J |
09J |
18J |
20J |
38J |
| е®ҡж јеҮәеҠӣ |
W |
264 |
440 |
628 |
817 |
691 |
754 |
75 |
113 |
226 |
251 |
358 |
| е®ҡж јгғҲгғ«гӮҜ ∗1 |
N·m |
28.0 |
70.0 |
100 |
130 |
220 |
240 |
6.00 |
9.00 |
18.0 |
20.0 |
38.0 |
| зһ¬жҷӮжңҖеӨ§гғҲгғ«гӮҜ |
N·m |
50.0 |
100 |
150 |
200 |
300 |
400 |
8.00 |
15.0 |
30.0 |
45.0 |
60.0 |
| гӮ№гғҲгғјгғ«гғҲгғ«гӮҜ |
N·m |
28.0 |
70.0 |
100 |
130 |
220 |
240 |
6.00 |
9.00 |
18.0 |
20.0 |
38.0 |
| е®ҡж јйӣ»жөҒ |
Arms |
5.2 |
5.6 |
5.5 |
5.0 |
5.6 |
4.8 |
4.0 |
3.4 |
3.0 |
2.2 |
3.1 |
| зһ¬жҷӮжңҖеӨ§йӣ»жөҒ |
Arms |
14.1 |
10.6 |
| е®ҡж јеӣһи»ўйҖҹеәҰ |
min-1 |
90 |
60 |
30 |
120 |
90 |
| жңҖй«ҳеӣһи»ўйҖҹеәҰ |
min-1 |
108 |
72 |
60 |
48 |
144 |
| гғҲгғ«гӮҜе®ҡж•° |
N·m/
Arms |
6.90 |
13.9 |
20.8 |
27.8 |
41.5 |
54.4 |
1.71 |
3.29 |
6.62 |
9.88 |
13.3 |
| еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲ |
×10-4
kg·m2 |
1800 |
2000 |
2300 |
2850 |
3400 |
4000 |
150 |
210 |
240 |
260 |
330 |
| е®ҡж јгғ‘гғҜгғјгғ¬гғјгғҲ |
kW/s |
4.36 |
24.5 |
43.5 |
59.3 |
142 |
144 |
2.40 |
3.86 |
13.5 |
15.4 |
43.8 |
| е®ҡж ји§’еҠ йҖҹеәҰ |
rad/s2 |
156 |
350 |
435 |
456 |
647 |
600 |
400 |
429 |
750 |
769 |
1150 |
| гғ’гғјгғҲгӮ·гғігӮҜгӮөгӮӨгӮә |
mm |
550 × 550 × 30 |
иЁұе®№иІ иҚ·ж…ЈжҖ§гғўгғјгғЎгғігғҲ
(еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲгҒ®еҖҚзҺҮ) |
еҖҚ |
50 |
100 |
90 |
80 |
100 |
150 |
350 |
250 |
240 |
220 |
180 |
| |
еӣһз”ҹжҠөжҠ—еӨ–д»ҳгҒ‘гҖҒ
DBжҠөжҠ—еӨ–д»ҳгҒ‘∗2гҒ®е ҙеҗҲ |
еҖҚ |
800 |
2000 |
2500 |
3000 |
100 |
150 |
700 |
900 |
2500 |
2000 |
2000 |
| иЁұе®№ иҚ·йҮҚ ∗2 |
иЁұе®№ гӮ№гғ©гӮ№гғҲ иҚ·йҮҚ |
жӯЈ |
N |
4 × 104 |
3 × 104 |
| йҖҶ |
N |
2 × 104 |
1 × 104 |
| иЁұе®№гғўгғјгғЎгғі иҚ·йҮҚ |
N·m |
400 |
200 |
| еүӣжҖ§ |
гӮ№гғ©гӮ№гғҲ еӨүдҪҚеүӣжҖ§ |
жӯЈ |
mm/N |
2 × 10-6 |
3 × 10-6 |
| йҖҶ |
mm/N |
3 × 10-6 |
4 × 10-6 |
| гғўгғјгғЎгғігғҲеӨүдҪҚ еүӣжҖ§ |
rad/N·m |
4 × 10-7 |
2 × 10-6 |
- ∗1
- е®ҡж јгғҲгғ«гӮҜгҒҜиЎЁиЁҳеҜёжі•гҒ®гӮўгғ«гғҹиЈҪгғ’гғјгғҲгӮ·гғігӮҜгҒ«еҸ–гӮҠд»ҳгҒ‘гҒҹе ҙеҗҲгҒ®дҪҝз”Ёе‘ЁеӣІжё©еәҰ40°C гҒ§гҒ®йҖЈз¶ҡиЁұе®№гғҲгғ«гӮҜеҖӨгӮ’зӨәгҒ—гҒҫгҒҷгҖӮ
- ∗2
-
гӮөгғјгғңгғўгғјгӮҝгҒ®йҒӢи»ўдёӯгҒ«еҠ гӮҸгӮӢгӮ№гғ©гӮ№гғҲиҚ·йҮҚгҖҒгғўгғјгғЎгғігғҲиҚ·йҮҚгҒҜгҖҒдёӢеӣігҒ®гғ‘гӮҝгғјгғігҒ«д»ЈиЎЁгҒ•гӮҢгҒҫгҒҷгҖӮ
иЎЁдёӯгҒ®еҖӨгӮ’и¶…гҒҲгҒӘгҒ„гӮҲгҒҶгҒ«ж©ҹжў°гҒ®иЁӯиЁҲгӮ’иЎҢгҒЈгҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
иЁұе®№иҚ·йҮҚгҒҜдёҖж–№еҗ‘гҒ®йқҷзҡ„иҚ·йҮҚгҒ«еҜҫгҒҷгӮӢгӮӮгҒ®гҒ§гҒҷгҖӮ
иЁӯиЁҲжҷӮгҒ®иЁұе®№иҚ·йҮҚгҒҜгҖҒиҚ·йҮҚгҒ®зЁӢеәҰгҒ«гӮҲгӮҠдёӢиЁҳгҒ®е®үе…ЁдҝӮж•°гӮ’д№—гҒҳгҒҹеҖӨгҒЁгҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
| · иЎқж’ғгҒ®гҒӘгҒ„еҶҶж»‘гҒӘйҒӢи»ў |
1/3 |
| · и»ҪеәҰгҒ®з№°гӮҠиҝ”гҒ—иҚ·йҮҚ |
1/5 |
| · иЎқж’ғиҚ·йҮҚ |
1/10 |
- (жіЁ)
-
- гӮөгғјгғңгғ‘гғғгӮҜгҒЁзө„гҒҝеҗҲгӮҸгҒӣгҒҰйҒӢи»ўгҒ—гҖҒйӣ»ж©ҹеӯҗе·»з·ҡжё©еәҰгҒҢ20°CгҒ®гҒЁгҒҚгҒ®еҖӨгҒ§гҒҷгҖӮгҒҫгҒҹгҖҒеҗ„еҖӨгҒҜд»ЈиЎЁеҖӨгҒ§гҒҷгҖӮ
- жң¬гӮөгғјгғңгғўгғјгӮҝгҒ«дҪҝз”ЁгҒ—гҒҰгҒ„гӮӢи»ёеҸ—гҒҜгҖҒи»ёеҸ—гҒ®жё©еәҰгҒ«гӮҲгҒЈгҒҰжҗҚеӨұгҒ«еӨүеӢ•гҒҢгҒӮгӮҠгҒҫгҒҷ (и»ёеҸ—гҒ®жҗҚеӨұгҒҜгҖҒдҪҺжё©жҷӮгҒ«й«ҳгҒҸгҒӘгӮҠгҒҫгҒҷ) гҖӮ
SGM7D-□□KгҖҒ-□□L
| йӣ»ең§ |
200 V |
| еҪўејҸ SGM7D- |
02K |
06K |
08K |
06L |
12L |
30L |
| е®ҡж јеҮәеҠӣ |
W |
52 |
151 |
201 |
113 |
226 |
565 |
| е®ҡж јгғҲгғ«гӮҜ ∗1 |
N·m |
2.06 |
6.00 |
8.00 |
6.00 |
12.0 |
30.0 |
| еҸҚеҫ©е®ҡж јгғҲгғ«гӮҜ ∗2 |
N·m |
- |
6.90 |
- |
- |
- |
- |
| зһ¬жҷӮжңҖеӨ§гғҲгғ«гӮҜ |
N·m |
5.00 |
10.0 |
15.0 |
10.0 |
20.0 |
40.0 |
| гӮ№гғҲгғјгғ«гғҲгғ«гӮҜ |
N·m |
2.06 |
6.00 |
8.00 |
6.00 |
12.0 |
30.0 |
| е®ҡж јйӣ»жөҒ |
Arms |
1.6 |
1.8 |
1.6 |
1.7 |
2.1 |
8.1 |
| зһ¬жҷӮжңҖеӨ§йӣ»жөҒ |
Arms |
4.2 |
4.2 |
4.2 |
14.1 |
| е®ҡж јеӣһи»ўйҖҹеәҰ |
min-1 |
240 |
180 |
| жңҖй«ҳеӣһи»ўйҖҹеәҰ |
min-1 |
360 |
216 |
| гғҲгғ«гӮҜе®ҡж•° |
N·m/
Arms |
1.83 |
3.67 |
5.50 |
4.13 |
6.59 |
3.95 |
| еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲ |
×10-4
kg·m2 |
60.0 |
70.0 |
80.0 |
220 |
220 |
370 |
| е®ҡж јгғ‘гғҜгғјгғ¬гғјгғҲ |
kW/s |
0.707 |
5.14 |
8.00 |
1.64 |
6.55 |
24.3 |
| е®ҡж ји§’еҠ йҖҹеәҰ |
rad/s2 |
343 |
857 |
1000 |
273 |
545 |
811 |
| гғ’гғјгғҲгӮ·гғігӮҜгӮөгӮӨгӮә |
mm |
550× 550 × 30 |
650× 650 × 30 |
иЁұе®№иІ иҚ·ж…ЈжҖ§гғўгғјгғЎгғігғҲ
(еӣһи»ўеӯҗж…ЈжҖ§гғўгғјгғЎгғігғҲгҒ®еҖҚзҺҮ) |
еҖҚ |
200 |
350 |
25 |
450 |
20 |
60 |
| |
еӣһз”ҹжҠөжҠ—еӨ–д»ҳгҒ‘гҒ®е ҙеҗҲ |
еҖҚ |
200 |
350 |
25 |
450 |
20 |
3500 |
| иЁұе®№ иҚ·йҮҚ ∗3 |
иЁұе®№ гӮ№гғ©гӮ№гғҲ иҚ·йҮҚ |
жӯЈ |
N |
5000 |
2000 |
| йҖҶ |
N |
3000 |
1000 |
| иЁұе®№гғўгғјгғЎгғігғҲ иҚ·йҮҚ |
N·m |
20 |
100 |
| еүӣжҖ§ |
гӮ№гғ©гӮ№гғҲ еӨүдҪҚеүӣжҖ§ |
жӯЈ |
mm/N |
4 × 10-6 |
вҖ“ |
| йҖҶ |
mm/N |
8 × 10-6 |
вҖ“ |
| гғўгғјгғЎгғігғҲеӨүдҪҚ еүӣжҖ§ |
rad/N·m |
8 × 10-6 |
вҖ“ |
- ∗1
- е®ҡж јгғҲгғ«гӮҜгҒҜиЎЁиЁҳеҜёжі•гҒ®гӮўгғ«гғҹиЈҪгғ’гғјгғҲгӮ·гғігӮҜгҒ«еҸ–гӮҠд»ҳгҒ‘гҒҹе ҙеҗҲгҒ®дҪҝз”Ёе‘ЁеӣІжё©еәҰ40°C гҒ§гҒ®йҖЈз¶ҡиЁұе®№гғҲгғ«гӮҜеҖӨгӮ’зӨәгҒ—гҒҫгҒҷгҖӮ
- ∗2
- еҸҚеҫ©е®ҡж јгғҲгғ«гӮҜгҒҜ60%EDжҷӮгҒ®еҖӨгҒ§гҒҷгҖӮ
- ∗3
-
гӮөгғјгғңгғўгғјгӮҝгҒ®йҒӢи»ўдёӯгҒ«еҠ гӮҸгӮӢгӮ№гғ©гӮ№гғҲиҚ·йҮҚгҖҒгғўгғјгғЎгғігғҲиҚ·йҮҚгҒҜгҖҒдёӢеӣігҒ®гғ‘гӮҝгғјгғігҒ«д»ЈиЎЁгҒ•гӮҢгҒҫгҒҷгҖӮ
иЎЁдёӯгҒ®еҖӨгӮ’и¶…гҒҲгҒӘгҒ„гӮҲгҒҶгҒ«ж©ҹжў°гҒ®иЁӯиЁҲгӮ’иЎҢгҒЈгҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
иЁұе®№иҚ·йҮҚгҒҜдёҖж–№еҗ‘гҒ®йқҷзҡ„иҚ·йҮҚгҒ«еҜҫгҒҷгӮӢгӮӮгҒ®гҒ§гҒҷгҖӮ
иЁӯиЁҲжҷӮгҒ®иЁұе®№иҚ·йҮҚгҒҜгҖҒиҚ·йҮҚгҒ®зЁӢеәҰгҒ«гӮҲгӮҠдёӢиЁҳгҒ®е®үе…ЁдҝӮж•°гӮ’д№—гҒҳгҒҹеҖӨгҒЁгҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
| · иЎқж’ғгҒ®гҒӘгҒ„еҶҶж»‘гҒӘйҒӢи»ў |
1/3 |
| · и»ҪеәҰгҒ®з№°гӮҠиҝ”гҒ—иҚ·йҮҚ |
1/5 |
| · иЎқж’ғиҚ·йҮҚ |
1/10 |
- (жіЁ)
-
- гӮөгғјгғңгғ‘гғғгӮҜгҒЁзө„гҒҝеҗҲгӮҸгҒӣгҒҰйҒӢи»ўгҒ—гҖҒйӣ»ж©ҹеӯҗе·»з·ҡжё©еәҰгҒҢ20°CгҒ®гҒЁгҒҚгҒ®еҖӨгҒ§гҒҷгҖӮгҒҫгҒҹгҖҒеҗ„еҖӨгҒҜд»ЈиЎЁеҖӨгҒ§гҒҷгҖӮ
- жң¬гӮөгғјгғңгғўгғјгӮҝгҒ«дҪҝз”ЁгҒ—гҒҰгҒ„гӮӢи»ёеҸ—гҒҜгҖҒи»ёеҸ—гҒ®жё©еәҰгҒ«гӮҲгҒЈгҒҰжҗҚеӨұгҒ«еӨүеӢ•гҒҢгҒӮгӮҠгҒҫгҒҷ (и»ёеҸ—гҒ®жҗҚеӨұгҒҜгҖҒдҪҺжё©жҷӮгҒ«й«ҳгҒҸгҒӘгӮҠгҒҫгҒҷ) гҖӮ


















 е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„
ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„ ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ«
з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ« дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„
дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„ YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј
YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј