世界初!新形7軸スポット溶接最適化ロボット MOTOMAN-VS50

- 2008/12/21

ロボット姿勢の7軸制御によって姿勢自由度をより拡大したほか、溶接用装備ケーブル・ホース類をロボットに完全内蔵しました。
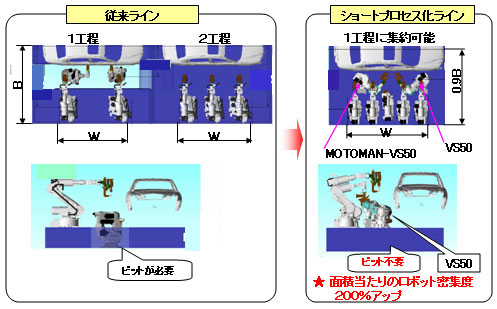
小形ロボットMOTOMAN-VS50の実現と、一般のスポット溶接ガンと同等の性能を有する超小形ガンの開発・搭載によって、ワークやロボット同士の干渉レス動作、接近配置に加え、低い姿勢、狭い空間への進入が可能で、従来必要としていたピットや広い設置面積を要するロボット配置が不要、分割工程の統合化などが可能になりました。
スポット溶接ロボットシステムにおける生産性の向上、溶接設備の高密度配置によるショートプロセスラインの実現を可能にしました。
|
7軸構成によるロボット姿勢の自由度拡大で、干渉レス動作を実現
ロボットの下アーム(下腕)部に、7軸目の回転軸(E軸)を設けた世界初となるスポット溶接最適化ロボットを実現しました。
この7軸制御によるロボット姿勢の自由度拡大で、アームの回り込み姿勢やスポット溶接ガン位置を固定したままでの自由な姿勢変更、低いロボット姿勢がとれます。
ロボットアームとワーク干渉、複数台設置のロボット同士の干渉回避が容易にできるほか、ワークやロボット同士の接近配置、ワークの低い・狭い場所への進入も容易でピットが不要になります。また、分割していた従来の工程を高密度配置によって統合したショートプロセス化が可能です。
小形・軽量のスポット溶接ガンの搭載に最適化
可搬質量50kgで、繰り返し位置決め精度は±0.1mmと高精度です。7軸制御によるロボット姿勢の自由度拡大、最大リーチ1630mmの広い動作範囲、動作特性の高速化を実現しました。
合わせて、超小形・軽量のスポット溶接ガンでありながら、一般のスポット溶接ガンと同等の加圧力を持つ溶接ガンの開発・搭載によって、干渉低減、高密度配置、作業性向上を図りました。
超小形・軽量のスポット溶接ガンの搭載例
(最大加圧力:5880N)
MOTOMAN-VS50の代表仕様
| 名称 |
MOTOMAN-VS50 |
| 可搬質量 |
50kg |
| 繰り返し位置決め精度 |
±0.1mm |
| 最大速度 |
S軸(旋回) |
2.97rad/s (170°/s) |
動作範囲 |
S軸 |
±180° |
| L軸(下腕) |
2.27rad/s (130°/s) |
L軸 |
+125°~-60° |
| E軸(肘) |
2.27rad/s (130°/s) |
E軸 |
±170° |
| U軸(上腕) |
2.27rad/s (130°/s) |
U軸 |
+215°~-35° |
| R軸(手首旋回) |
2.27rad/s (130°/s) |
R軸 |
±170° |
| B軸(手首振り) |
2.27rad/s (130°/s) |
B軸 |
±125° |
| T軸(手首回転) |
3.49rad/s (200°/s) |
T軸 |
±180° |
| 本体質量 |
640kg |
溶接用装備ケーブルやホース類をロボットに完全内蔵(世界初)
下腕部のE軸からアーム先端部のT軸までの各駆動軸には、当社が開発した小形・中空の高性能アクチュエータ(ギヤ等も内蔵)を適用しています。駆動ケーブルのほか、スポット溶接のアプリケーション用として、ガンモータ用や溶接電源線等のコネクタ・端子、冷却水用ホースをロボット内に全て内蔵できます。
ケーブルやホース類が他のロボットやワークと干渉せず、接近配置・操作が容易、ケーブル類の挙動スペース不要、寿命延長などに寄与します。


















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー