Σ-XгӮ·гғӘгғјгӮә
еҪўејҸгҒ®иҰӢж–№
гӮөгғјгғңгғ‘гғғгӮҜ
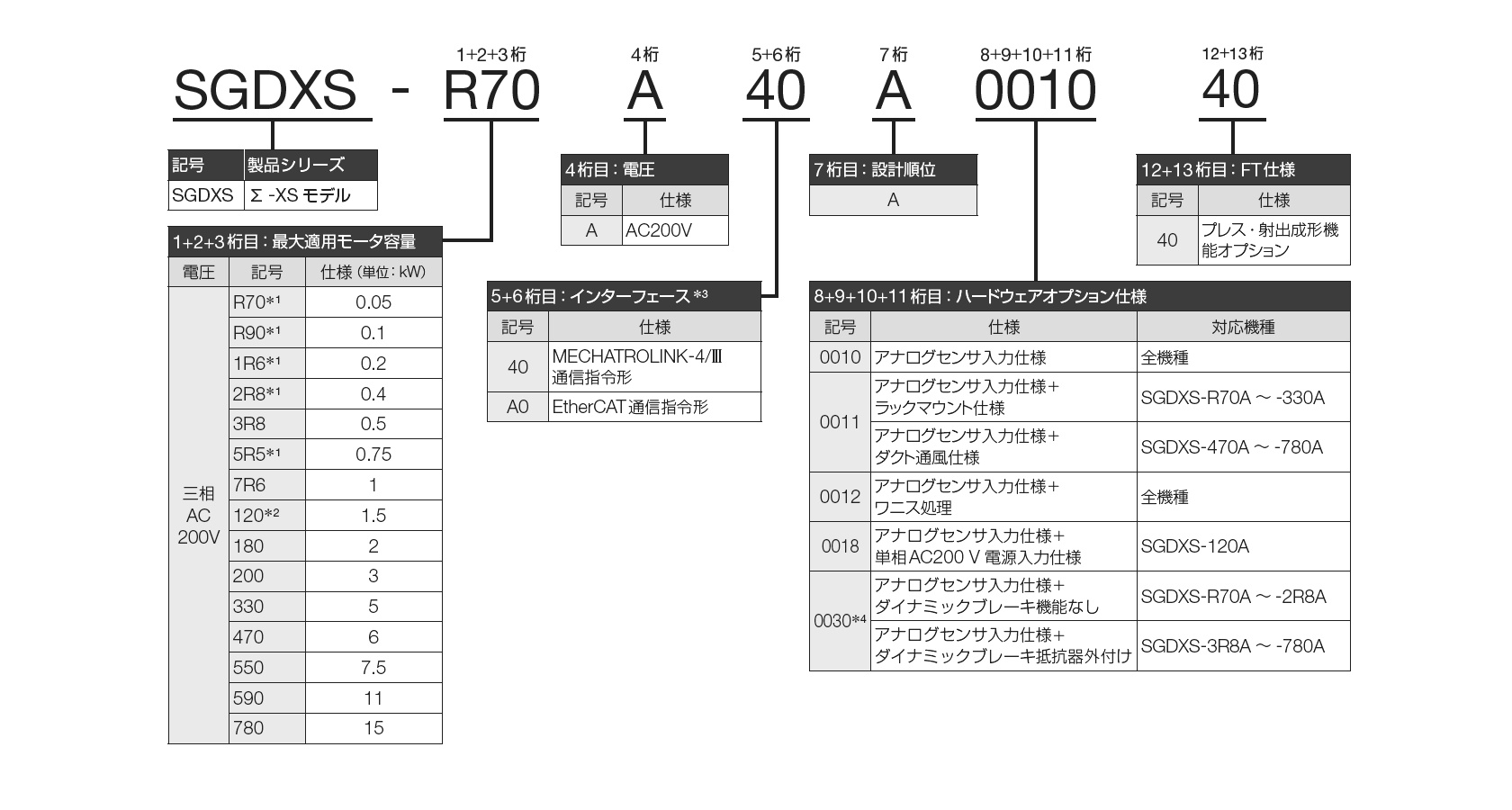
Σ-XS FT40
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A0018пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
- ∗4
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜгҖҒд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
Σ-XгӮ·гғӘгғјгӮә Σ-XS/Σ-XW/Σ-XT гӮөгғјгғңгғ‘гғғгӮҜгғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯ
гӮӘгғ—гӮ·гғ§гғіиЈҪе“ҒгғһгғӢгғҘгӮўгғ«пјҲиіҮж–ҷз•ӘеҸ·пјҡSIJP C710812 14пјү

Σ-XS FT54
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A200856пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
Σ-XS FT55
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A200855пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
Σ-XS FT56
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A200856пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
Σ-XS FT63пјҲM4/IIIпјү
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A0008пјү
- ∗3
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜпјҢд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
Σ-XгӮ·гғӘгғјгӮә Σ-XS/Σ-XW/Σ-XTгӮөгғјгғңгғ‘гғғгӮҜ гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳ гғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯгӮӘгғ—гӮ·гғ§гғі иЈҪе“ҒгғһгғӢгғҘгӮўгғ«пјҲиіҮж–ҷз•ӘеҸ·пјҡSIJP C710812 14пјү
Σ-XS FT63пјҲEtherCATпјү
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A40A0008пјү
- ∗3
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜпјҢд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
Σ-XгӮ·гғӘгғјгӮә Σ-XS/Σ-XW/Σ-XTгӮөгғјгғңгғ‘гғғгӮҜ гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳ гғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯгӮӘгғ—гӮ·гғ§гғі иЈҪе“ҒгғһгғӢгғҘгӮўгғ«пјҲиіҮж–ҷз•ӘеҸ·пјҡSIJP C710812 14пјү
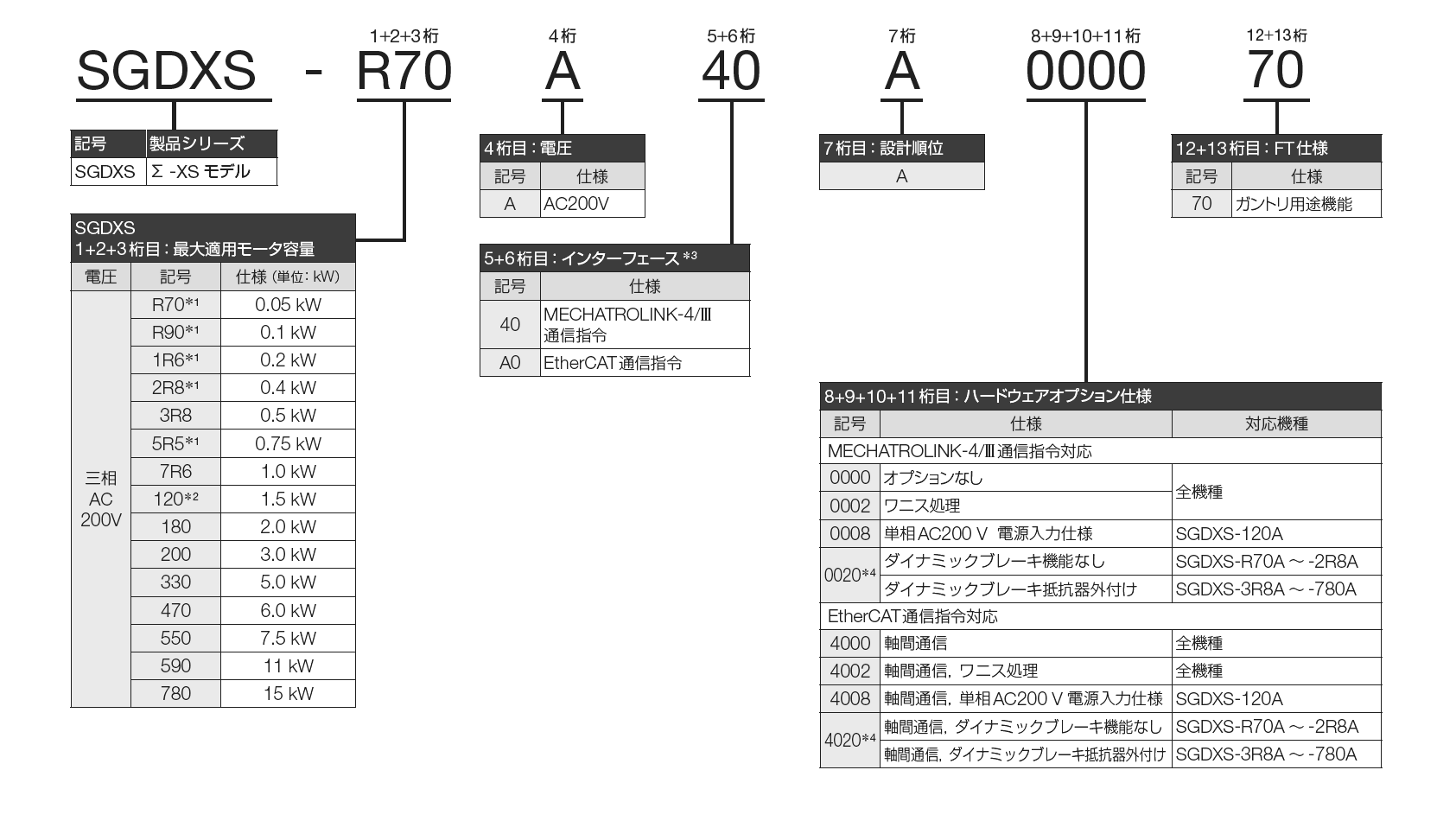
Σ-XS FT70
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲMECHATROLINK-4/IIIйҖҡдҝЎжҢҮд»ӨпјҡSGDXS-120A40A0008пјҢ
EtherCATйҖҡдҝЎжҢҮд»ӨпјҡSGDXS-120AA0A4008пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
- ∗4
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜгҖҒд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
Σ-XгӮ·гғӘгғјгӮә Σ-XS/Σ-XW/Σ-XT гӮөгғјгғңгғ‘гғғгӮҜгғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯгӮӘгғ—гӮ·гғ§гғі
иЈҪе“ҒгғһгғӢгғҘгӮўгғ«(SIJP C710812 14)
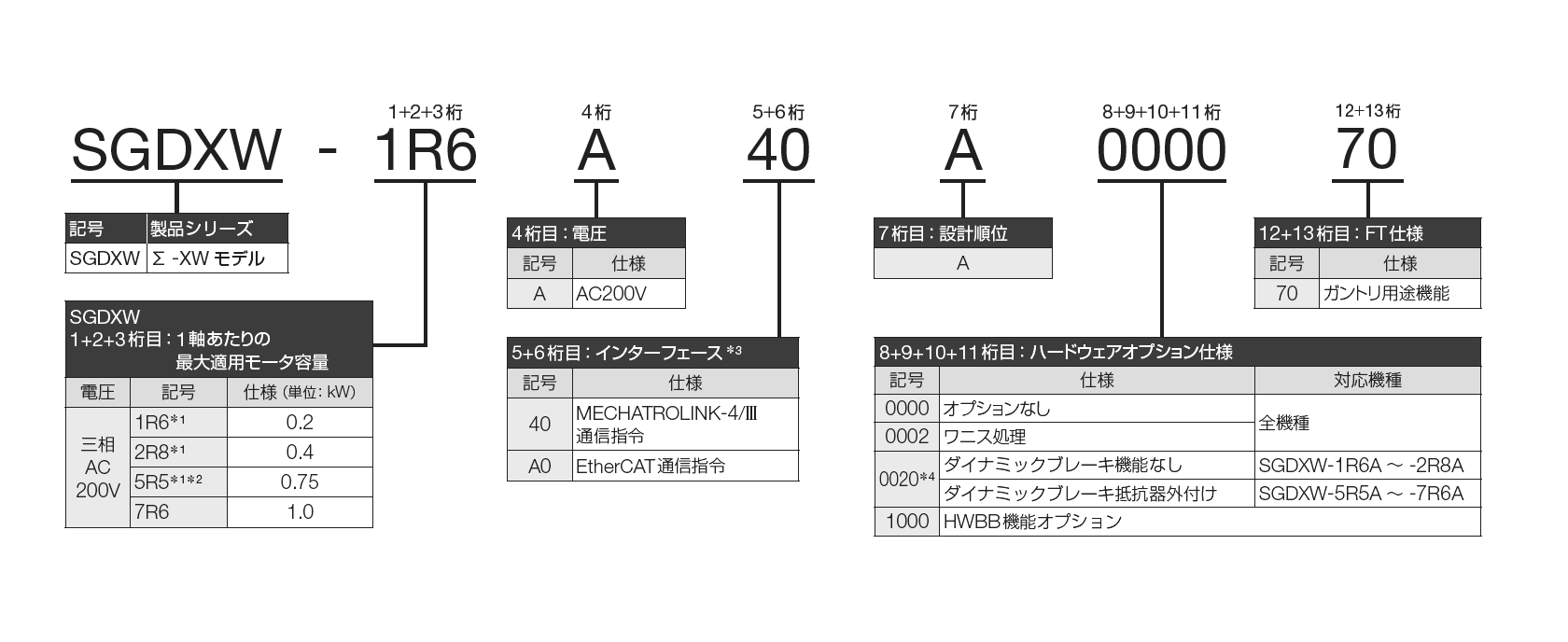
Σ-XW FT70
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- еҚҳзӣёAC200 Vйӣ»жәҗе…ҘеҠӣгҒ§дҪҝз”ЁгҒҷгӮӢе ҙеҗҲгҒҜгҖҒиІ иҚ·зҺҮгӮ’65% гҒ«жёӣе®ҡж јгҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮд»ҘдёӢгҒ«дҫӢгӮ’жҢҷгҒ’гҒҫгҒҷгҖӮ
1и»ёзӣ®гҒ®иІ иҚ·зҺҮгҒҢ90%гҒ®е ҙеҗҲпјҢ2и»ёзӣ®гҒ®иІ иҚ·зҺҮгӮ’40%гҒЁгҒ—гҖҒ2гҒӨгҒ®и»ёгҒ®е№іеқҮиІ иҚ·зҺҮгӮ’65%гҒ«гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
пјҲпјҲ90% + 40%пјү/2 = 65%пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
- ∗4
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜгҖҒд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
Σ-XгӮ·гғӘгғјгӮә Σ-XS/Σ-XW/Σ-XT гӮөгғјгғңгғ‘гғғгӮҜгғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯ
гӮӘгғ—гӮ·гғ§гғіиЈҪе“ҒгғһгғӢгғҘгӮўгғ«(SIJP C710812 14)
Σ-XS FT79
- ∗1
- еҚҳзӣёгҒҠгӮҲгҒідёүзӣёе…ҘеҠӣгҒ§гҒ®дҪҝз”ЁгҒҢеҸҜиғҪгҒ§гҒҷгҖӮ
- ∗2
- гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳгҒ§еҚҳзӣёAC200 VеҜҫеҝңе“ҒгӮ’жә–еӮҷгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
пјҲеҪўејҸпјҡSGDXS-120A00A0008пјү
- ∗3
- еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝгҒЁгғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝе…ұйҖҡгҒ§гҒҷгҖӮ
- ∗4
- и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜпјҢд»ҘдёӢгҒ®гғһгғӢгғҘгӮўгғ«гӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ
ОЈ-XгӮ·гғӘгғјгӮә ОЈ-XS/ОЈ-XW/ОЈ-XTгӮөгғјгғңгғ‘гғғгӮҜ гғҸгғјгғүгӮҰгӮ§гӮўгӮӘгғ—гӮ·гғ§гғід»•ж§ҳ гғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯгӮӘгғ—гӮ·гғ§гғі иЈҪе“ҒгғһгғӢгғҘгӮўгғ«пјҲиіҮж–ҷз•ӘеҸ·пјҡSIJP C710812 14пјү


















 е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„
ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„ ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ«
з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ« дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„
дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„ YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј
YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј