MPX1310
多軸化する装置の最適制御
多軸化する装置の最適制御で、機械や装置の高速化と生産性向上を実現
背景
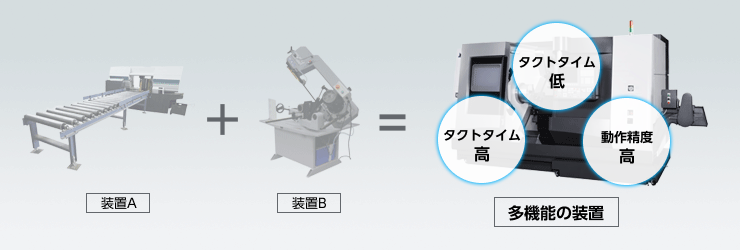
近年、自動化の進展に伴い複数の装置が統合され、装置の多軸化・多機能化が進んでいます。
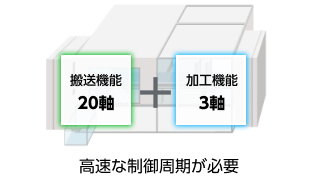
多軸化した装置は、全ての軸が一つの機能を実行するのではなく、実現する機能の単位で分かれて制御することがほとんどです。
そして、その機能ごとに求められる動作精度やタクトタイムが異なるケースがあります。
MPX1310は、装置の機能ごとに独立した周期でモーション制御を実行できます。
それらの制御周期は同期し、かつ分散・並列実行することで、装置を最適に制御します。
搬送装置+加工装置の例
装置アプリケーションの分散
マルチコアによる装置アプリケーションの並列実行
MPX1310は装置アプリケーションを実行する2つのモーション制御周期を持つことができます。
マルチコアによって、それらのモーション制御処理は並列実行させることができます。
MECHATROLINK-4×2回線を標準搭載
モーション制御周期同様、高速な通信周期の回線と、低速な通信周期の回線を両立させることができます。
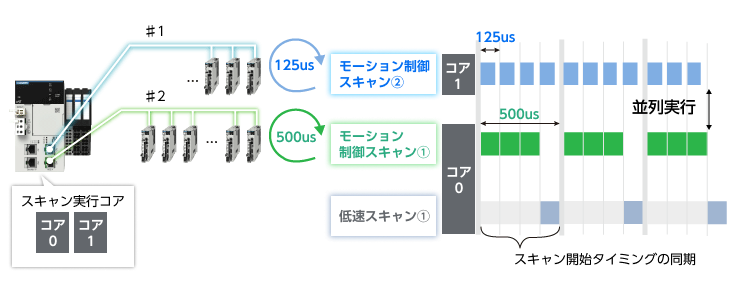
<例>
- 125μsの制御軸: MECHATROLNIK-4 #1の回線に接続。
モーション制御をする高速スキャン①をコア0に追加し、アプリケーションを構築します。
- 500μsの制御軸: MECHATROLNIK-4 #2の回線に接続。
モーション制御をする高速スキャン②は、コア1で処理します。



















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー