| 項目 |
仕様 |
| 制御方式 |
IGBT PWM 制御 正弦波電流駆動方式 |
| フィードバック |
回転形サーボモータ組合せ時 |
| シリアルエンコーダ : |
17 ビット (絶対値エンコーダ)
20 ビット、24 ビット |
(インクリメンタルエンコーダ/絶対値エンコーダ)
22 ビット(絶対値エンコーダ) |
|
| リニアサーボモータ組合せ時 |
- 絶対値リニアエンコーダ
(信号分解能は、絶対値リニアエンコーダによって異なります。)
- インクリメンタルリニアエンコーダ
(信号分解能は、インクリメンタルリニアエンコーダ及びシリアル変換ユニットによって異なります。)
|
| 環境条件 |
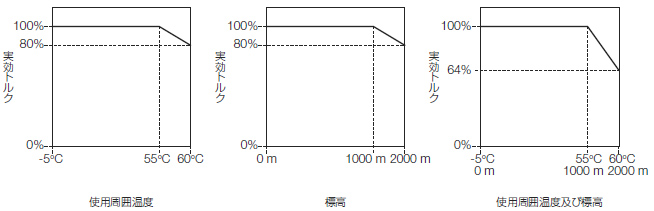
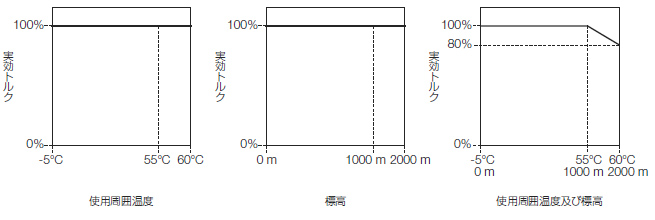
使用周囲温度∗1 |
-5 ℃ ~ 55 ℃(55 ℃ ~ 60 ℃の場合は減定格にて使用可能)
「減定格の仕様」を参照してください。 |
| 保存温度 |
-20 ℃ ~ 85 ℃ |
| 使用周囲湿度 |
95 %RH以下(凍結、結露しないこと) |
| 保存湿度 |
95 %RH以下(凍結、結露しないこと) |
| 耐振動 |
4.9 m/s2 |
| 耐衝撃 |
19.6 m/s2 |
| 保護等級 |
| 等級 |
サーボパック形式 : SGD7S- |
| IP20 |
R70A、R90A、1R6A、2R8A、3R8A、5R5A、7R6A、120A、R70F、R90F、2R1F、2R8F |
| IP10 |
120A10A008、180A、200A、330A、470A、550A、590A、780A |
|
| 汚損度 |
2
- 腐食性ガス、可燃性ガスがないこと
- 水 · 油 · 薬品がかからないこと
- ちり、ほこり、塩分、金属粉が少ない雰囲気であること
|
| 標高∗1 |
1000 m以下
(1000 m ~ 2000 m の場合は減定格にて使用可能)
「減定格の仕様」を参照してください。 |
| その他 |
静電気ノイズの発生、強い電界 · 磁界、放射線のないこと |
| 適合規格 |
UL61800-5-1 (E165827)、CSA C22.2 No.274、EN50178、
EN61800-5-1、EN55011 group1 class A、EN61000-6-2、
EN61000-6-4、EN61800-3、IEC61508-1、IEC61508-2、IEC61508-4、
IEC61800-5-2、IEC62061、ISO13849-1、IEC61326-3-1
|
| 取付タイプ |
| 取付タイプ |
サーボパック形式 : SGD7S- |
| ベースマウントタイプ |
全機種 |
| ラックマウントタイプ |
R70A、R90A、1R6A、2R8A、3R8A、5R5A、7R6A、120A、180A、200A、330A、R70F、R90F、2R1F、2R8F |
| ダクト通風タイプ |
470A、550A、590A、780A |
|
| 性能 |
速度制御範囲 |
1:5000
(速度制御範囲の下限は、定格トルク負荷時に停止しない条件下の数値) |
| 速度変動率∗2 |
定格速度の± 0.01 % 以下(負荷変動:0 % ~ 100 % 時) |
| 定格速度の0 %(電圧変動:± 10 % 時) |
| 定格速度の± 0.1% 以下(温度変動:25 ℃ ± 25 ℃時) |
| トルク制御精度(再現性) |
±1 % |
| ソフトスタート時間設定 |
0 s ~ 10 s(加速 · 減速それぞれ設定可能) |
| 入出力信号 |
エンコーダ分周パルス出力 |
A相、B相、C相 : ラインドライバ出力
分周パルス数 : 任意設定可能 |
| リニアサーボモータ過熱保護信号入力 |
入力点数 : 1点
入力電圧範囲 : 0 V ~ +5 V |
| シーケンス入力信号 |
割り付け可能な入力信号 |
動作可能電圧範囲 : DC24 V ±20 %
入力点数 : 7点 |
入力方式 : シンク入力、ソース入力
入力信号 :
- サーボオン入力(/S-ON) 信号
- P 動作指令入力(/P-CON) 信号
- 正転側駆動禁止入力(P-OT) 信号、逆転側駆動禁止入力(N-OT) 信号
- アラームリセット入力(/ALM-RST) 信号
- 正転側外部トルク制限入力(/P-CL) 信号、逆転側外部トルク制限入力(/N-CL) 信号
- モータ回転方向切り替え入力(/SPD-D) 信号
- 内部設定速度切り替え入力(/SPD-A、/SPD-B) 信号
- 制御方式切り替え入力(/C-SEL) 信号
- ゼロクランプ入力(/ZCLAMP) 信号
- 指令パルス阻止入力(/INHIBIT) 信号
- 磁極検出入力(/P-DET) 信号
- ゲイン切り替え入力(/G-SEL) 信号
- 指令パルス入力倍率切り替え入力(/PSEL) 信号
- エンコーダ絶対値データ要求入力(SEN) 信号
信号の割り付け及び正論理、負論理の変更が可能 |
| シーケンス出力信号 |
固定出力 |
動作可能電圧範囲 : DC5 V ~ DC30 V
出力点数 : 1点
出力信号 : サーボアラーム出力(ALM) 信号 |
| 割り付け可能な出力信号 |
動作可能電圧範囲 : DC5 V ~ DC30 V
出力点数 : 3点
(出力方式 : フォトカプラ出力(絶縁式)) |
出力信号 :
- 位置決め完了出力(/COIN) 信号
- 速度一致出力(/V-CMP) 信号
- 回転検出出力(/TGON) 信号
- サーボレディ出力(/S-RDY) 信号
- トルク制限検出出力(/CLT) 信号
- 速度制限検出出力(/VLT) 信号
- ブレーキ出力(/BK) 信号
- ワーニング出力(/WARN) 信号
- 位置決め近傍出力(/NEAR) 信号
信号の割り付け及び正論理、負論理の変更が可能
|
| 通信機能 |
RS422A通信(CN3) |
接続機器 |
ディジタルオペレータ(JUSP-OP05A-1-E)、
パソコン(SigmaWin+対応) |
| 1 : N通信 |
RS422Aポート時、N = 15局まで可能 |
| 軸アドレス設定 |
パラメータ設定 |
| USB通信(CN7) |
接続機器 |
パソコン(SigmaWin+対応) |
| 通信規格 |
USB2.0規格に準拠(12 Mbps) |
| 表示機能 |
CHARGE、PWR、COM、7セグメントLED × 1桁 |
| MECHATROLINK-II通信 |
通信プロトコル |
MECHATROLINK-II |
| 局アドレス設定 |
41H ~ 5FH(最大接続スレーブ数 : 30局)
ロータリスイッチ(S2)とディップスイッチ(S3)の組合せで選択 |
| 伝送速度 |
10 Mbps、4 Mbps
ディップスイッチ(S3)で選択 |
| 伝送周期 |
250 μs、0.5 ms ~ 4.0 ms(0.5 msの倍数) |
| 伝送バイト数 |
17バイト/局、32バイト/局
ディップスイッチ(S3)で選択 |
| 指令方式 |
動作仕様 |
MECHATROLINK-II通信による位置制御、速度制御、トルク制御 |
| 指令入力 |
MECHATROLINK-I、MECHATROLINK-IIコマンド
(シーケンス、モーション、データ設定・参照、モニタ、調整など) |
| MECHATROLINK-II通信設定用スイッチ |
ロータリスイッチ(S2)ポジション : 16ポジション |
| ディップスイッチ(S3)極数 : 4極 |
| 観測用アナログモニタ機能(CN5) |
点数 : 2点
出力電圧範囲 : DC ±10 V(直線性有効範囲±8 V)
分解能 : 16ビット
精度 : ±20 mV(Typ)
最大出力電流 : ±10 mA
セトリング時間(±1 %) : 1.2 ms(Typ) |
| ダイナミックブレーキ(DB) |
主回路電源オフ、サーボアラーム、サーボオフ、オーバトラベル(OT)時に動作 |
| 回生処理 |
機能内蔵(SGD7S-470A ~ -780A は抵抗器外付け)
カタログを参照してください。 |
| オーバトラベル(OT)防止 |
正転側駆動禁止入力(P-OT) 信号、逆転側駆動禁止入力(N-OT) 信号によりダイナミックブレーキ(DB)、減速停止またはフリーラン停止 |
| 保護機能 |
過電流、過電圧、不足電圧、過負荷、回生異常など |
| 補助機能 |
ゲイン調整、アラーム履歴、JOG運転、原点サーチなど |
| セーフティ機能 |
入力 |
/HWBB1、/HWBB2 : パワーモジュールのベースブロック信号 |
| 出力 |
EDM1 : 内蔵セーフティ回路の状態監視(固定出力) |
| 適合規格∗3 |
ISO13849-1 PLe(Category 3)、IEC61508 SIL3 |
| オプションモジュール |
フルクローズモジュール、セーフティモジュール
(注)フルクローズモジュールとセーフティモジュールを一緒に取り付けることはできません。 |


















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー