AL4511 落下量許容範囲異常はサーボON時に、前回サーボOFF時と今回サーボON時のロボット位置の
パルス差が許容パルスを超えた場合に発生します。
ロボット製品を輸送後の初回電源投入時に発生する場合は、輸送時の振動によってロボット位置が許容パルスを
超えたことによって発生したものと考えられます。
生産稼働でご使用いただいているロボットにおいてサーボON時に本アラームが発生する場合には、該当軸モータの
ブレーキ性能劣化によって発生している可能性が考えられます。
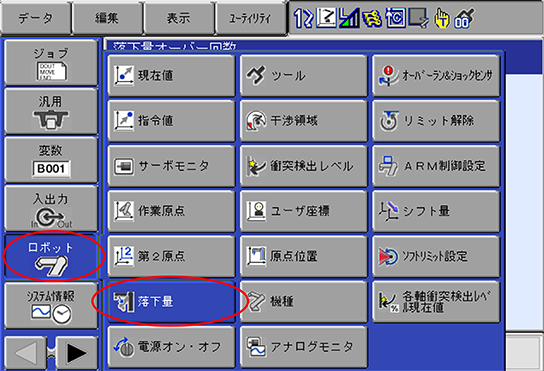
発生軸の確認はプログラミングペンダントの操作で行うことが可能です。
・ロボット⇒落下量(セキュリティーレベルは管理モード以上)
落下量許容範囲異常アラームの積算回数が軸別で表示されます。
セキュリティーレベルの変更につきましては、「FAQ-01027 セキュリティーモードの変更手順を教えてください」を
ご参照ください。
トラブル対応の際にアブソリュートデータを書き換えた後にサーボ電源を投入すると、AL4511 落下量許容範囲
異常が発生するがございます。以下場合は故障によるアラーム発生ではございません。
・エンコーダバックアップアラーム修復機能によるアブソリュートデータ復旧後の初回サーボON
・アブソリュートデータを手入力によるデータ変更後の初回サーボON
また、安全にロボットをご使用いただくため、お客さまの方で落下量許容パルスの設定変更はできません。
詳細につきましては、「FAQ-01193 ユーザー側で落下量許容範囲異常の許容パルス値は変更可能ですか?」を
ご参照ください。
詳細につきましては、以下マニュアルをご参照ください。
・R-CHO-A114 YRC1000保守要領書 7.10 ロボット落下量許容範囲異常時の状態
・R-CHO-A113 DX200保守要領書 7.10 ロボット落下量許容範囲異常時の状態
・R-CHO-A108 DX100保守要領書 7.10 ロボット落下量許容範囲異常時の状態
|


















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー