| й …зӣ® |
д»•ж§ҳ |
| еҲ¶еҫЎж–№ејҸ |
IGBT PWM еҲ¶еҫЎгҖҖжӯЈејҰжіўйӣ»жөҒй§ҶеӢ•ж–№ејҸ |
| гғ•гӮЈгғјгғүгғҗгғғгӮҜ |
еӣһи»ўеҪўгӮөгғјгғңгғўгғјгӮҝ
зө„еҗҲгҒӣжҷӮ |
| гӮ·гғӘгӮўгғ«гӮЁгғігӮігғјгғҖпјҡ |
| гҖҖ |
17 гғ“гғғгғҲпјҲзө¶еҜҫеҖӨгӮЁгғігӮігғјгғҖпјү
20 гғ“гғғгғҲгҖҒ24 гғ“гғғгғҲ
пјҲгӮӨгғігӮҜгғӘгғЎгғігӮҝгғ«гӮЁгғігӮігғјгғҖпјҸзө¶еҜҫеҖӨгӮЁгғігӮігғјгғҖпјү
22 гғ“гғғгғҲпјҲзө¶еҜҫеҖӨгӮЁгғігӮігғјгғҖпјү |
|
гғӘгғӢгӮўгӮөгғјгғңгғўгғјгӮҝ
зө„еҗҲгҒӣжҷӮ |
- зө¶еҜҫеҖӨгғӘгғӢгӮўгӮЁгғігӮігғјгғҖ
пјҲдҝЎеҸ·еҲҶи§ЈиғҪгҒҜгҖҒзө¶еҜҫеҖӨгғӘгғӢгӮўгӮЁгғігӮігғјгғҖгҒ«гӮҲгҒЈгҒҰз•°гҒӘгӮҠгҒҫгҒҷгҖӮпјү
- гӮӨгғігӮҜгғӘгғЎгғігӮҝгғ«гғӘгғӢгӮўгӮЁгғігӮігғјгғҖ
пјҲдҝЎеҸ·еҲҶи§ЈиғҪгҒҜгҖҒгӮӨгғігӮҜгғӘгғЎгғігӮҝгғ«гғӘгғӢгӮўгӮЁгғігӮігғјгғҖеҸҠгҒігӮ·гғӘгӮўгғ«еӨүжҸӣгғҰгғӢгғғгғҲгҒ«гӮҲгҒЈгҒҰз•°гҒӘгӮҠгҒҫгҒҷгҖӮпјү
|
| з’°еўғжқЎд»¶ |
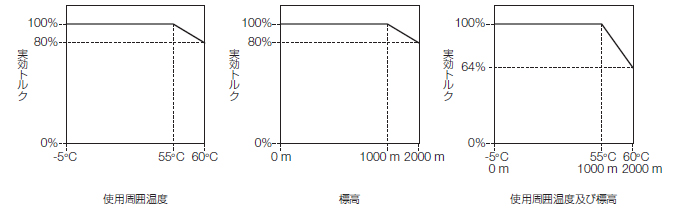
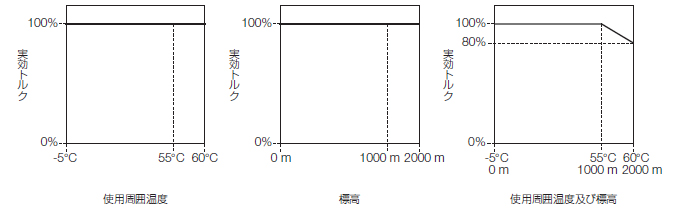
дҪҝз”Ёе‘ЁеӣІжё©еәҰ∗1 |
-5°C пҪһ 55°C
пјҲ55°C пҪһ 60°C гҒ®е ҙеҗҲгҒҜжёӣе®ҡж јгҒ«гҒҰдҪҝз”ЁеҸҜиғҪ
гҖҢжёӣе®ҡж јгҒ®д»•ж§ҳгҖҚгӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ |
| дҝқеӯҳжё©еәҰ |
-20°C пҪһ 85°C |
| дҪҝз”Ёе‘ЁеӣІж№ҝеәҰ |
95пј…RH д»ҘдёӢпјҲеҮҚзөҗгҖҒзөҗйңІгҒ—гҒӘгҒ„гҒ“гҒЁпјү |
| дҝқеӯҳж№ҝеәҰ |
95пј…RH д»ҘдёӢпјҲеҮҚзөҗгҖҒзөҗйңІгҒ—гҒӘгҒ„гҒ“гҒЁпјү |
| иҖҗжҢҜеӢ• |
4.9 m/s2 |
| иҖҗиЎқж’ғ |
19.6 m/s2 |
| дҝқиӯ·зӯүзҙҡ |
| зӯүзҙҡ |
гӮөгғјгғңгғ‘гғғгӮҜеҪўејҸпјҡSGD7SвҲ’ |
| IP20 |
R70AгҖҒR90AгҖҒ1R6AгҖҒ2R8AгҖҒ3R8AгҖҒ5R5AгҖҒ7R6AгҖҒ120A |
| IP10 |
120A40A008гҖҒ180AгҖҒ200AгҖҒ330AгҖҒ470AгҖҒ550AгҖҒ590AгҖҒ780A |
|
| жұҡжҗҚеәҰ |
2
- и…җйЈҹжҖ§гӮ¬гӮ№гҖҒеҸҜзҮғжҖ§гӮ¬гӮ№гҒҢгҒӘгҒ„гҒ“гҒЁ
- ж°ҙ·жІ№·и–¬е“ҒгҒҢгҒӢгҒӢгӮүгҒӘгҒ„гҒ“гҒЁ
- гҒЎгӮҠгҖҒгҒ»гҒ“гӮҠгҖҒеЎ©еҲҶгҖҒйҮ‘еұһзІүгҒҢе°‘гҒӘгҒ„йӣ°еӣІж°—гҒ§гҒӮгӮӢгҒ“гҒЁ
|
| жЁҷй«ҳ∗1 |
1000 m д»ҘдёӢ
пјҲ1000 m пҪһ 2000 m гҒ®е ҙеҗҲгҒҜжёӣе®ҡж јгҒ«гҒҰдҪҝз”ЁеҸҜиғҪ
гҖҢжёӣе®ҡж јгҒ®д»•ж§ҳгҖҚгӮ’еҸӮз…§гҒ—гҒҰгҒҸгҒ гҒ•гҒ„гҖӮ |
| гҒқгҒ®д»– |
йқҷйӣ»ж°—гғҺгӮӨгӮәгҒ®зҷәз”ҹгҖҒеј·гҒ„йӣ»з•Ңгғ»зЈҒз•ҢгҖҒж”ҫе°„з·ҡгҒ®гҒӘгҒ„гҒ“гҒЁ |
| йҒ©еҗҲиҰҸж ј |
и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜиЈҪе“ҒгғһгғӢгғҘгӮўгғ«гӮ’гҒ”еҸӮз…§гҒҸгҒ гҒ•гҒ„гҖӮ
ULиҰҸж јгғ»EUжҢҮд»Өгғ»е®үе…ЁиҰҸж јгҒёгҒ®йҒ©еҗҲгҒ®гғҡгғјгӮё
гҒ”еҲ©з”ЁгҒ«гҒӮгҒҹгҒЈгҒҰгҒҜгҖҒдјҡе“Ўзҷ»йҢІ / гғӯгӮ°гӮӨгғігҒҢеҝ…иҰҒгҒ§гҒҷгҖӮ |
| еҸ–д»ҳгӮҝгӮӨгғ— |
| еҸ–д»ҳгӮҝгӮӨгғ— |
гӮөгғјгғңгғ‘гғғгӮҜеҪўејҸпјҡSGD7SвҲ’ |
| гғҷгғјгӮ№гғһгӮҰгғігғҲгӮҝгӮӨгғ— |
е…Ёж©ҹзЁ® |
| гғ©гғғгӮҜгғһгӮҰгғігғҲгӮҝгӮӨгғ— |
R70AпјҢR90AпјҢ1R6AпјҢ2R8AпјҢ3R8AпјҢ5R5A,7R6AпјҢ120AпјҢ180AпјҢ200AпјҢ330A |
| гғҖгӮҜгғҲйҖҡйўЁгӮҝгӮӨгғ— |
470AпјҢ550AпјҢ590AпјҢ780A |
|
| жҖ§иғҪ |
йҖҹеәҰеҲ¶еҫЎзҜ„еӣІ |
1:5000
пјҲйҖҹеәҰеҲ¶еҫЎзҜ„еӣІгҒ®дёӢйҷҗгҒҜгҖҒе®ҡж јгғҲгғ«гӮҜиІ иҚ·жҷӮгҒ«еҒңжӯўгҒ—гҒӘгҒ„жқЎд»¶дёӢгҒ®ж•°еҖӨпјү |
| йҖҹеәҰеӨүеӢ•зҺҮ∗2 |
е®ҡж јйҖҹеәҰгҒ®±0.01% д»ҘдёӢпјҲиІ иҚ·еӨүеӢ•пјҡ0% пҪһ 100% жҷӮпјү |
| е®ҡж јйҖҹеәҰгҒ®0%пјҲйӣ»ең§еӨүеӢ•пјҡ±10% жҷӮпјү |
| е®ҡж јйҖҹеәҰгҒ®±0.1% д»ҘдёӢпјҲжё©еәҰеӨүеӢ•пјҡ25°C ±25°C жҷӮпјү |
| гғҲгғ«гӮҜеҲ¶еҫЎзІҫеәҰпјҲеҶҚзҸҫжҖ§пјү |
±1% |
| гӮҪгғ•гғҲгӮ№гӮҝгғјгғҲжҷӮй–“иЁӯе®ҡ |
0 s пҪһ 10 sпјҲеҠ йҖҹгғ»жёӣйҖҹгҒқгӮҢгҒһгӮҢиЁӯе®ҡеҸҜиғҪпјү |
| е…ҘеҮәеҠӣдҝЎеҸ· |
гӮЁгғігӮігғјгғҖеҲҶе‘Ёгғ‘гғ«гӮ№еҮәеҠӣ |
A зӣёгҖҒB зӣёгҖҒC зӣёпјҡгғ©гӮӨгғігғүгғ©гӮӨгғҗеҮәеҠӣ
еҲҶе‘Ёгғ‘гғ«гӮ№ж•°пјҡд»»ж„ҸиЁӯе®ҡеҸҜиғҪ |
| йҒҺзҶұдҝқиӯ·е…ҘеҠӣ |
е…ҘеҠӣзӮ№ж•°пјҡ1 зӮ№
е…ҘеҠӣйӣ»ең§зҜ„еӣІпјҡ0 V пҪһ +5 V |
гӮ·гғјгӮұгғігӮ№
е…ҘеҠӣдҝЎеҸ· |
еүІгӮҠд»ҳгҒ‘
еҸҜиғҪгҒӘ
е…ҘеҠӣдҝЎеҸ· |
еӢ•дҪңеҸҜиғҪйӣ»ең§зҜ„еӣІпјҡDC24 V ±20%
е…ҘеҠӣзӮ№ж•°пјҡ7 зӮ№
пјҲе…ҘеҠӣж–№ејҸпјҡгӮ·гғігӮҜе…ҘеҠӣгҖҒгӮҪгғјгӮ№е…ҘеҠӣпјү |
е…ҘеҠӣдҝЎеҸ·пјҡ
- жӯЈи»ўеҒҙй§ҶеӢ•зҰҒжӯўе…ҘеҠӣ(P-OT) дҝЎеҸ·гҖҒйҖҶи»ўеҒҙй§ҶеӢ•зҰҒжӯўе…ҘеҠӣ(N-OT) дҝЎеҸ·
- жӯЈи»ўеҒҙеӨ–йғЁгғҲгғ«гӮҜеҲ¶йҷҗе…ҘеҠӣ(/P-CL) дҝЎеҸ·гҖҒйҖҶи»ўеҒҙеӨ–йғЁгғҲгғ«гӮҜеҲ¶йҷҗе…ҘеҠӣ(/N-CL) дҝЎеҸ·
- еҺҹзӮ№еҫ©её°жёӣйҖҹгӮ№гӮӨгғғгғҒе…ҘеҠӣ(/DEC) дҝЎеҸ·
- еӨ–йғЁгғ©гғғгғҒе…ҘеҠӣ1 пҪһ 3 (/EXT 1 пҪһ 3) дҝЎеҸ·
- еј·еҲ¶еҒңжӯўе…ҘеҠӣ(FSTP) дҝЎеҸ·
дҝЎеҸ·гҒ®еүІгӮҠд»ҳгҒ‘еҸҠгҒіжӯЈи«–зҗҶгҖҒиІ и«–зҗҶгҒ®еӨүжӣҙгҒҢеҸҜиғҪ
|
гӮ·гғјгӮұгғігӮ№
еҮәеҠӣдҝЎеҸ· |
еӣәе®ҡеҮәеҠӣ |
еӢ•дҪңеҸҜиғҪйӣ»ең§зҜ„еӣІпјҡDC5 V пҪһ DC30 V
еҮәеҠӣзӮ№ж•°пјҡ1 зӮ№
пјҲеҮәеҠӣж–№ејҸпјҡгғ•гӮ©гғҲгӮ«гғ—гғ©еҮәеҠӣпјҲзө¶зёҒејҸпјүпјү |
| еҮәеҠӣдҝЎеҸ·пјҡгӮөгғјгғңгӮўгғ©гғјгғ еҮәеҠӣ(ALM) дҝЎеҸ· |
еүІгӮҠд»ҳгҒ‘
еҸҜиғҪгҒӘ
еҮәеҠӣдҝЎеҸ· |
еӢ•дҪңеҸҜиғҪйӣ»ең§зҜ„еӣІпјҡDC5 V пҪһ DC30 V
еҮәеҠӣзӮ№ж•°пјҡ3 зӮ№
пјҲеҮәеҠӣж–№ејҸпјҡгғ•гӮ©гғҲгӮ«гғ—гғ©еҮәеҠӣпјҲзө¶зёҒејҸпјүпјү |
еҮәеҠӣдҝЎеҸ·пјҡ
- дҪҚзҪ®жұәгӮҒе®ҢдәҶеҮәеҠӣ(/COIN) дҝЎеҸ·
- йҖҹеәҰдёҖиҮҙеҮәеҠӣ(/V-CMP) дҝЎеҸ·
- еӣһи»ўжӨңеҮәеҮәеҠӣ(/TGON) дҝЎеҸ·
- гӮөгғјгғңгғ¬гғҮгӮЈеҮәеҠӣ(/S-RDY) дҝЎеҸ·
- гғҲгғ«гӮҜеҲ¶йҷҗжӨңеҮәеҮәеҠӣ(/CLT) дҝЎеҸ·
- йҖҹеәҰеҲ¶йҷҗжӨңеҮәеҮәеҠӣ(/VLT) дҝЎеҸ·
- гғ–гғ¬гғјгӮӯеҲ¶еҫЎеҮәеҠӣ(/BK) дҝЎеҸ·
- гғҜгғјгғӢгғігӮ°еҮәеҠӣ(/WARN) дҝЎеҸ·
- дҪҚзҪ®жұәгӮҒиҝ‘еӮҚеҮәеҠӣ(/NEAR) дҝЎеҸ·
дҝЎеҸ·гҒ®еүІгӮҠд»ҳгҒ‘еҸҠгҒіжӯЈи«–зҗҶгҖҒиІ и«–зҗҶгҒ®еӨүжӣҙгҒҢеҸҜиғҪ
|
| йҖҡдҝЎж©ҹиғҪ |
RS422AйҖҡдҝЎ(CN502) |
жҺҘз¶ҡж©ҹеҷЁ |
гғҮгӮЈгӮёгӮҝгғ«гӮӘгғҡгғ¬гғјгӮҝ(JUSP-OP05A-1-E)
гғҮгӮЈгӮёгӮҝгғ«гӮӘгғҡгғ¬гғјгӮҝгӮ’жҺҘз¶ҡгҒҷгӮӢе ҙеҗҲгҒҜгҖҒгӮігғҹгғҘгғӢгӮұгғјгӮ·гғ§гғігғҰгғӢгғғгғҲ(JUSP-JC001-1) гҒҢеҝ…иҰҒгҒ§гҒҷгҖӮ |
| 1пјҡNйҖҡдҝЎ |
RS422A гғқгғјгғҲжҷӮгҖҒN = 15 еұҖгҒҫгҒ§еҸҜиғҪ |
| и»ёгӮўгғүгғ¬гӮ№иЁӯе®ҡ |
01h пҪһ 7Fh
гғӯгғјгӮҝгғӘгӮ№гӮӨгғғгғҒ(S1гҖҒS2) гҒ§иЁӯе®ҡ |
| USB йҖҡдҝЎ(CN7) |
жҺҘз¶ҡж©ҹеҷЁ |
гғ‘гӮҪгӮігғіпјҲSigmaWin+ еҜҫеҝңпјү |
| йҖҡдҝЎиҰҸж ј |
USB2.0 иҰҸж јгҒ«жә–жӢ (12 Mbps) |
| иЎЁзӨәж©ҹиғҪ |
CHARGEгҖҒPWRгҖҒCNгҖҒL1гҖҒL2гҖҒ7 гӮ»гӮ°гғЎгғігғҲLED × 1 жЎҒ |
| MECHATROLINK-4йҖҡдҝЎ |
йҖҡдҝЎгғ—гғӯгғҲгӮігғ« |
MECHATROLINK-4 |
| еұҖгӮўгғүгғ¬гӮ№иЁӯе®ҡ |
01h пҪһ FFhпјҲжңҖеӨ§жҺҘз¶ҡгӮ№гғ¬гғјгғ–ж•°пјҡ127 еұҖпјү
гғӯгғјгӮҝгғӘгӮ№гӮӨгғғгғҒ(S1гҖҒS2) гҒ§иЁӯе®ҡ |
| дјқйҖҒйҖҹеәҰ |
100 Mbps |
| дјқйҖҒе‘Ёжңҹ |
125 μsпјҢ250 μsпјҢ500 μsпјҢ750 μsпјҢ1.0 ms пҪһ 4.0 ms
пјҲ0.5 ms гҒ®еҖҚж•°пјү |
| дјқйҖҒгғҗгӮӨгғҲж•° |
16 пҪһ 80 гғҗгӮӨгғҲпјҸеұҖ |
| жҢҮд»Өж–№ејҸ |
еӢ•дҪңд»•ж§ҳ |
MECHATROLINK-4 йҖҡдҝЎгҒ«гӮҲгӮӢдҪҚзҪ®еҲ¶еҫЎгҖҒйҖҹеәҰеҲ¶еҫЎгҖҒгғҲгғ«гӮҜеҲ¶еҫЎ |
| жҢҮд»Өе…ҘеҠӣ |
MECHATROLINK-4 гӮігғһгғігғү
пјҲгӮ·гғјгӮұгғігӮ№гҖҒгғўгғјгӮ·гғ§гғігҖҒгғҮгғјгӮҝиЁӯе®ҡгғ»еҸӮз…§гҖҒгғўгғӢгӮҝгҖҒиӘҝж•ҙгҒӘгҒ©пјү |
| гғ—гғӯгғ•гӮЎгӮӨгғ« |
MECHATROLINK-4 жЁҷжә–гӮөгғјгғңгғ—гғӯгғ•гӮЎгӮӨгғ«
MECHATROLINK-III жЁҷжә–гӮөгғјгғңгғ—гғӯгғ•гӮЎгӮӨгғ« |
| иҰіжё¬з”ЁгӮўгғҠгғӯгӮ°гғўгғӢгӮҝж©ҹиғҪ(CN5) |
зӮ№ж•°пјҡ 2 зӮ№
еҮәеҠӣйӣ»ең§зҜ„еӣІпјҡ DC ±10 VпјҲзӣҙз·ҡжҖ§жңүеҠ№зҜ„еӣІ±8 Vпјү
еҲҶи§ЈиғҪпјҡ 16 гғ“гғғгғҲ
зІҫеәҰпјҡ ±20 mV (Typ)
жңҖеӨ§еҮәеҠӣйӣ»жөҒпјҡ ±10 mA
гӮ»гғҲгғӘгғігӮ°жҷӮй–“(±1%)пјҡ 1.2 ms (Typ) |
| гғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯ(DB) |
дё»еӣһи·Ҝйӣ»жәҗгӮӘгғ•гҖҒгӮөгғјгғңгӮўгғ©гғјгғ гҖҒгӮөгғјгғңгӮӘгғ•гҖҒгӮӘгғјгғҗгғҲгғ©гғҷгғ«(OT) жҷӮгҒ«еӢ•дҪң |
| еӣһз”ҹеҮҰзҗҶ |
ж©ҹиғҪеҶ…и”өпјҲSGD7S-470A пҪһ -780A гҒҜжҠөжҠ—еҷЁеӨ–д»ҳгҒ‘пјү
и©ізҙ°гҒ«гҒӨгҒ„гҒҰгҒҜиЈҪе“ҒгғһгғӢгғҘгӮўгғ«гӮ’гҒ”еҸӮз…§гҒҸгҒ гҒ•гҒ„гҖӮ
еӣһз”ҹжҠөжҠ—еҷЁгҒ®гғҡгғјгӮё |
| гӮӘгғјгғҗгғҲгғ©гғҷгғ«(OT) йҳІжӯў |
жӯЈи»ўеҒҙй§ҶеӢ•зҰҒжӯўе…ҘеҠӣ(P-OT) дҝЎеҸ·гҖҒйҖҶи»ўеҒҙй§ҶеӢ•зҰҒжӯўе…ҘеҠӣ(N-OT) дҝЎеҸ·гҒ«гӮҲгӮҠгғҖгӮӨгғҠгғҹгғғгӮҜгғ–гғ¬гғјгӮӯ(DB)гҖҒжёӣйҖҹеҒңжӯўгҒҫгҒҹгҒҜгғ•гғӘгғјгғ©гғіеҒңжӯў |
| дҝқиӯ·ж©ҹиғҪ |
йҒҺйӣ»жөҒгҖҒйҒҺйӣ»ең§гҖҒдёҚи¶ійӣ»ең§гҖҒйҒҺиІ иҚ·гҖҒеӣһз”ҹз•°еёёгҒӘгҒ© |
| иЈңеҠ©ж©ҹиғҪ |
гӮІгӮӨгғіиӘҝж•ҙгҖҒгӮўгғ©гғјгғ еұҘжӯҙгҖҒJOG йҒӢи»ўгҖҒеҺҹзӮ№гӮөгғјгғҒгҒӘгҒ© |
| гӮ»гғјгғ•гғҶгӮЈж©ҹиғҪ |
е…ҘеҠӣ |
/HWBB1гҖҒ/HWBB2пјҡгғ‘гғҜгғјгғўгӮёгғҘгғјгғ«гҒ®гғҷгғјгӮ№гғ–гғӯгғғгӮҜдҝЎеҸ· |
| еҮәеҠӣ |
EDM1пјҡеҶ…и”өгӮ»гғјгғ•гғҶгӮЈеӣһи·ҜгҒ®зҠ¶ж…ӢзӣЈиҰ–пјҲеӣәе®ҡеҮәеҠӣпјү |
| йҒ©еҗҲиҰҸж ј∗3 |
ISO13849-1 PLe (Category 3)гҖҒIEC61508 SIL3 |
| еҜҫеҝңгӮӘгғ—гӮ·гғ§гғігғўгӮёгғҘгғјгғ« |
гғ•гғ«гӮҜгғӯгғјгӮәгғўгӮёгғҘгғјгғ«гҖҒгӮ»гғјгғ•гғҶгӮЈгғўгӮёгғҘгғјгғ«
- (жіЁ)
- гғ•гғ«гӮҜгғӯгғјгӮәгғўгӮёгғҘгғјгғ«гҒЁгӮ»гғјгғ•гғҶгӮЈгғўгӮёгғҘгғјгғ«гӮ’дёҖз·’гҒ«еҸ–д»ҳгҒ‘гӮӢгҒ“гҒЁгҒҜгҒ§гҒҚгҒҫгҒӣгӮ“гҖӮ
|


















 е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
е°Һе…ҘгӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„
ж”№йҖ жӣҙж–°гӮ’жӨңиЁҺгҒ—гҒҹгҒ„ ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„
ж•…йҡңеҫ©ж—§гӮөгғқгғјгғҲгӮ’еҸ—гҒ‘гҒҹгҒ„ з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ«
з”ҹз”Јдёӯжӯўж©ҹзЁ®гҒ®гӮөгғқгғјгғҲгҒ« дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„
дҝқе®Ҳгғ»дҝқе…ЁгӮөгғјгғ“гӮ№гӮ’еҸ—гҒ‘гҒҹгҒ„ YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј
YASKAWAгӮ·гӮ№гғҶгғ гӮӨгғігғҶгӮ°гғ¬гғјгӮ·гғ§гғігғ‘гғјгғҲгғҠгғј