■操作手順:
➀セキュリティモードを【安全モード】に変更します。
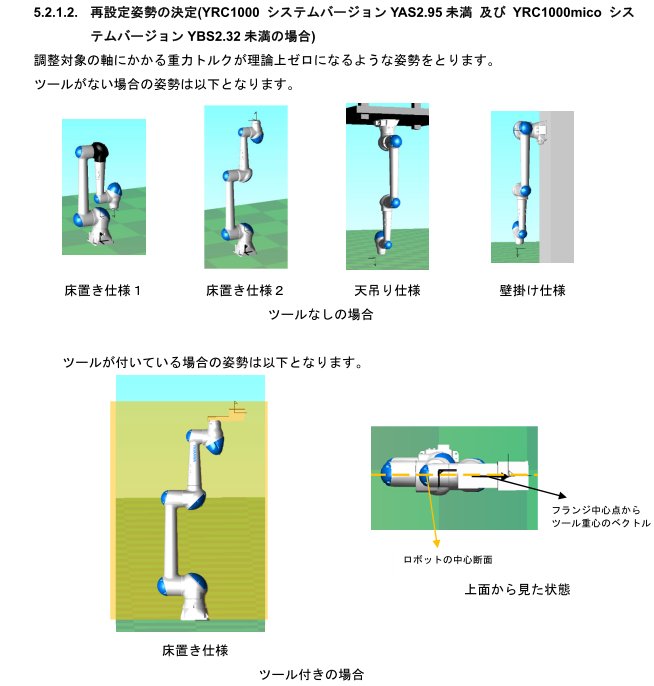
②軸操作にて、調査対象の軸にかかる重力トルクが理論上ゼロになるような姿勢を取ります。(図1)
※システムソフトウェアバージョンが YAS 2.95 以降または YBS 2.32 以降の場合は、②の操作は不要です。任意の姿勢で実行可能です。
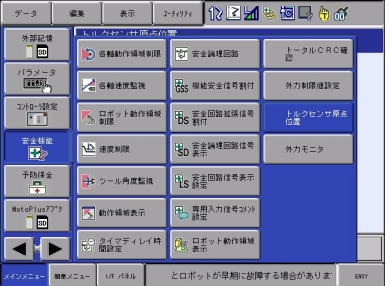
③メインメニュー:【安全機能】より【トルクセンサ原点位置】を選択します。(図2)
④設定する軸を選択します(全軸対象の場合、画面上部【編集】より【全ての軸を選択】を選択します)。
⑤確認ダイアログ表示後、【はい】を選択します。
⑥画面下面の【リードバック】を押すと、【書き込み】と【キャンセル】が表示されます。
【リードバック】: 設定したデータが外力監視基板に転送されます。
【書き込み】: 外力監視基板に設定された対象ファイルの設定を記憶します。
【キャンセル】: 対象ファイルを破棄して元の状態に戻します。
⑦【書き込み】を選択時、「ファイルを更新してよろしいでしょうか」というダイアログが表示されます。
⇒「はい」を選択すると、外力監視基板に転送されたデータと対象ファイルの設定データが一致している場合に、外力監視基板に対象ファイルの設定が記憶されます。
⇒「いいえ」を選択すると、外力監視基板にファイルの設定は記憶されません。
※【書き込み】を押して、確認ダイアログ「ファイルを更新してよろしいですか?」で「はい」を選択するまでは、設定したデータは確定されません。
詳細は、YRC1000 / YRC1000micro 協働運転説明書 [HW1484763] 5.2項をご参照ください。
|

















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー