【導入事例】人協働ロボット導入による組立自動化事例

安川電機 ロボット第一工場
人協働ロボットを導入した小型ロボット組立の自動化事例
安川電機のロボット第一工場では、小型ロボットの組立ラインに、人協働ロボットMOTOMAN-HCシリーズを導入しています。
人協働ロボットの特性を活かした生産ラインを構築することで、従来発生していた作業ミスや品質のばらつきを解消し、高品質化、生産性向上、設備の小型化を実現した事例をご紹介します。
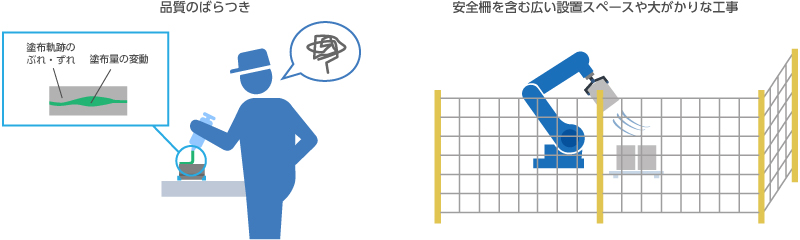
課題 人作業によるミスや、品質・作業時間のばらつきが発生
従来の小型ロボットの組立ラインでは、ボルト締めやシール剤塗布の工程を人手作業で行っていましたが、ボルトの締め付けトルクやシール剤の塗布量・塗布軌跡のばらつき、作業者ごとに作業時間がばらつくなどの課題が発生していました。
この課題を解決するために、一般的な産業用ロボットの導入を検討しましたが、安全柵を設置するスペースや大がかりな工事が自動化のネックでした。
ソリューション 人協働ロボットを導入し人と同じセルの中で作業を分担
安全柵なし* で使用できる人協働ロボットMOTOMAN-HC10DTを導入し、その特長を活かして人とロボットが同じセルの中で作業分担する組立ラインを構築しました。
人は、細かな位置調整や不定型なものを扱う部品組付け作業、人協働ロボットは定型作業ながら正確な作業で品質確保が必要なボルト締めやシール材塗布を行います。
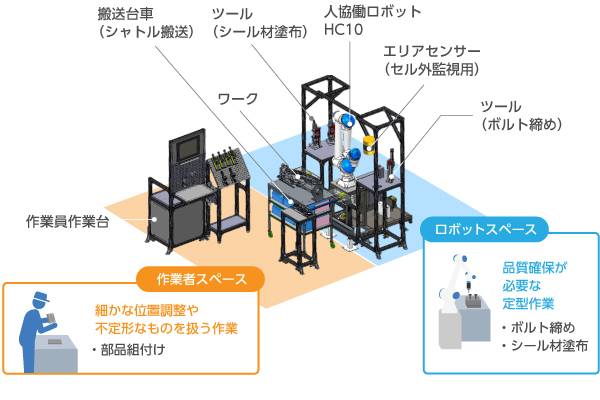
∗HCシリーズは安全機能により安全柵なしのシステム構築が可能ですが、すべてのケースにおいてリスクアセスメントを実施する必要があります。
ロボット導入の効果
ボルト締めやシール材塗布の作業品質安定
導入前
導入の効果
人協働ロボットMOTOMAN-HC10DTを導入しボルト締めやシール剤塗布を自動化することで、人作業によるミスやばらつきがなくなり、作業品質が安定しました。
作業のペースメーカとなりタクトタイムが安定
導入前
作業者によって作業時間にばらつきが発生していた
導入の効果
人の間に人協働ロボットMOTOMAN-HC10DTが入り、一定のタクトタイムで作業を実施しています。
人のみでは発生していた作業時間のばらつきが、ロボットの作業に合わせることでおのずと安定し、全体のタクトタイムが安定しました。
安全柵レス*で省スペース。設備の規模が小さく、今後のレイアウト変更が容易に
導入前
-
一般的な産業用ロボットは導入に安全柵を含めたスペースが必要で、その確保が難しかった。
-
安全柵やロボットの架台・定板、これらのアンカーなどの固定設備の設置工事、及び重機によるロボットの搬送など、導入作業が大がかりになり手間がかかっていた。
-
一度設置してしまうと再び上記の手間が発生するため、生産内容の変更や生産量の変動に対して素早く設備を変更して対応することが難しくなっていた。
導入の効果
人協働ロボットMOTOMAN-HCシリーズの安全機能とエリアセンサーを併用して安全を確保し、安全柵の設置や撤去の必要がない、安全柵なし* の省スペースな設備を実現しました。
また、人協働ロボットMOTOMAN-HC10DTハンドキャリータイプを採用することで、キャスター付き台車による簡単移動・簡単設置が可能となり、重機による搬送やロボット固定のための大がかりな工事も不要となりました。
そして、人協働ロボット特有の設置・移設のしやすさにより、生産設備を変更しやすい拡張性を保ったままの自動化が実現しました。
∗HCシリーズは安全機能により安全柵なしのシステム構築が可能ですが、すべてのケースにおいてリスクアセスメントを実施する必要があります。
組立工程で実施している、人協働ロボットの3つの安全対策
対策1. 接触・衝突の影響を低く抑える
-
組立工程の人協働ロボットは、人や物と接触すると安全に停止する協働運転状態で常に動作させています。そのため、人がロボットと接触・衝突してもロボット自身がそれを検知して動作を停止し、人に影響を与えないように衝撃を緩和します。
PFL機能について見る
-
セルの裏面にはエリアセンサーを設置し、セルの外から人が接近した場合はロボットを停止させます。
これは、ロボットの存在を知らない人が意図しない接触・衝突を起こした際に、ロボットから人に与える衝撃を極力減らすためです。
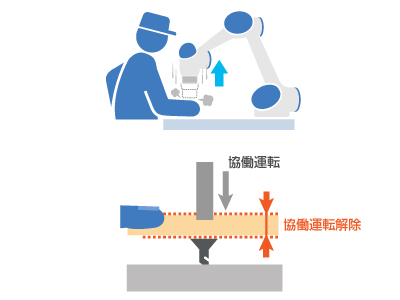
対策2. 挟込みを防ぐ
-
接触・衝突への対策と同様に、常に協働運転状態で動作させ、挟込みが発生した場合はロボットが離脱動作を行い、挟込みを解消します。
挟込み離脱機能について見る
-
ねじ締めとツールの交換をロボットが行うときのみ、協働運転状態を解除しています。これは、作業により発生した外力をロボットが接触による外力と誤認して停止することがあり、作業が止まってしまうためです。
この際、指が挟み込まれない位置までツールを動かしてから協働運転状態を解除することで、挟み込まれるリスクを抑えています。
対策3. 接触機会を減らす
ロボットが作業をしている間、人はロボットの動作範囲に立ち入らないような作業を行う、というように、同一のセルの中で作業手順とレイアウトを調整しています。
▼人協働ロボットを導入するには?特長や用途が分かる!▼

関連製品
分類
| アプリケーション | 組立 |
|---|
| テーマ | 小型化・軽量化、高品質化、高精度化、生産性向上、人協働 |
|---|
| 製品 | ロボット |
|---|



















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー この事例についてもっと詳しく!お問い合わせはこちら
この事例についてもっと詳しく!お問い合わせはこちら