安川電機×中原製作所×浜名エンジニアリング
既存工作機械を流用した加工システムの構築
人協働ロボットMOTOMAN-HC20DTP、YRMコントローラ
人手不足や変種変量生産などの経営環境の変化に強いモノづくりを実現するため、安川電機は株式会社中原製作所(以下、中原製作所)、浜名エンジニアリング株式会社(以下、浜名エンジニアリング)と協創し、町工場がすぐに始められる自動化に取り組んでいます。今回は、豊富な工作機械による部品加工が強みである中原製作所への導入事例をご紹介します。これまで人が行っていた工作機械へのワークの投入・取出し作業を自動化するにあたり、当社の製品を用いてシステムを構築いただいたポイントをご紹介いたします。
課題既存の工作機械を流用して、稼働率の向上と多品種少量生産に対応したい
中原製作所では、豊富な工作機械で様々な部品加工を行っており、工作機械へのワーク投入と加工後のワーク取り出しを人が行っていました。しかし、全国的な人手不足や多品種少量生産への対応が求められる中で、以下のような課題が出てきました。
1. 作業者の負担を軽減し、かつ稼働率を向上させたい
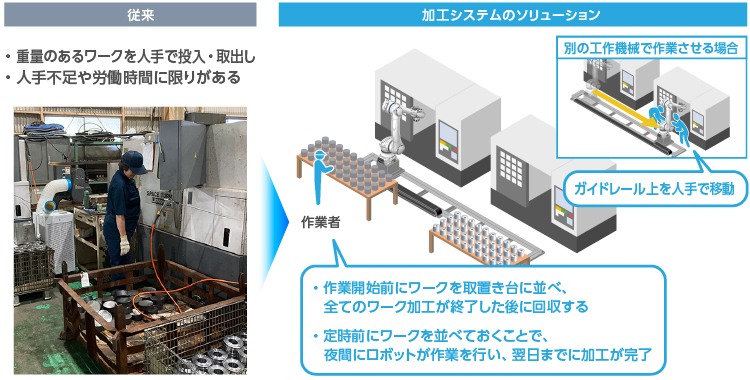
もともと、工作機械へ金属製のワーク(数kg)の投入と取り出しを繰り返す作業は作業者の負荷が大きく、負担の軽減が課題でした。同時に、生産量を増やすために工作機械の稼働率を向上させたいという課題もありました。工作機械の夜間(定時時間外)の稼働を検討しましたが、作業者の労働時間の制限や人手不足も相まって実現は困難でした。
これらに対応するため、ロボットなどを用いて作業を自動化する必要がありました。
2. 自動化しつつ多品種少量生産に対応したい
多品種少量生産に対応するため、生産する部品が頻繁に切り替わったり、部品の品種が追加されたりといったことが多くなっていました。 この際、扱うワークや使用する工作機械、作業をする場所なども変わるため、ワークや工作機械に合わせてつかみ方や投入・取出しの仕方、立つ位置を変える必要がありました。これらは人であれば柔軟に対応できますが、ロボットを用いて自動化する場合は、その都度ロボットの設置位置や動作を調整したり、新しい動作をティーチングしたり、といったように手間や時間がかかってしまうという課題がありました。
3. 既存の工作機械をそのまま使いたい
自動化のコストを抑えるために既存の工作機械を流用することは必須でした 。そのような中でロボットを導入し運用するためには、ロボットと既存の工作機械が容易に連携可能で、工作機械のメーカーに依存しないシステムを構築する必要がありました。
ソリューション人協働ロボットMOTOMAN-HC20DTPとYRMコントローラを使用し、既存の工作機械と接続可能な加工システムを構築
今回、安川電機・中原製作所・浜名エンジアリングの協創事例では、安川電機の人協働ロボットMOTOMAN-HC20DTPとYRMコントローラを用いて、既存の工作機械をそのまま使用した加工システムを構築しました。
また、3つの課題を以下のように対応し解決しています。
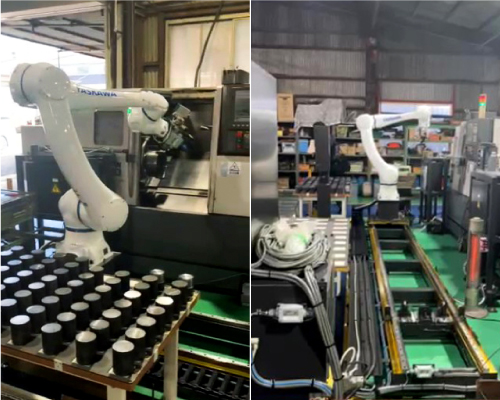
▼協創事例:株式会社中原製作所に設置されたMOTOMAN-HC20DTP
課題への対応
1. 作業者の負担を軽減し、かつ稼働率を向上させたい
解決のポイント①
⇒ロボットによる作業の自動化、および、夜間の無人稼働
人協働ロボットMOTOMAN-HC20DTPの導入によって工作機械へのワーク投入・取出し作業を自動化しました。これにより作業者の負荷が減るとともに、他の作業への従事が可能となりました。さらに、夜間も含めた12時間の連続無人稼働が行えるようになり、工作機械の稼働率が向上しました。また、人協働ロボットを採用したことで、安全柵を設置しないシステムの構築が可能となり、製造現場のレイアウト変更を最小限に抑えつつ、必要な工作機械の位置へ人手でロボットを適宜移動できる仕組みを構築できました。
2. 自動化しつつ多品種少量生産に対応したい
解決のポイント②
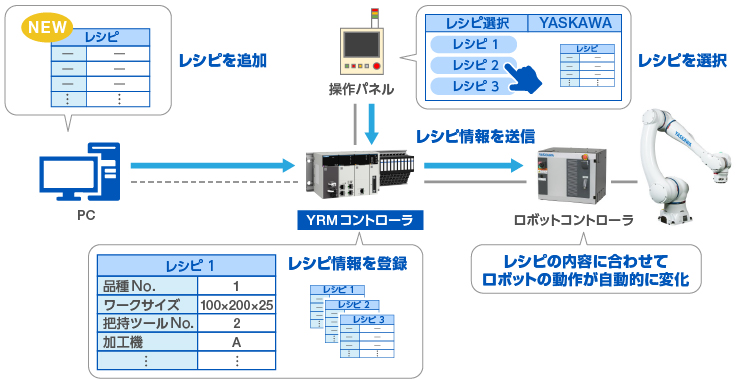
⇒ワークや工作機械などのデータに基づいたレシピを登録し、ロボットが対応した動作へ自動的に変化
様々なワークの一つひとつに対して、工作機械への投入・取り出しに必要な情報※をまとめたレシピを作成しました。作成したレシピは加工システムを統合制御しているYRMコントローラに登録されており、このレシピの情報を参照してロボットは自身の動き方を、それぞれのワークに対応した動作へと変化させます。
また、ワークの品種追加の際も、そのワークの投入・取り出しに必要な情報を新たなレシピとして登録することで、新たにロボットのティーチングを行う必要もなく、ロボットの動作が自動的に変化します。そのため、ロボットの動作チェックと微調整のみで品種追加が可能です。
これらにより、多品種少量生産に対応できる自動化を実現しました。
※ ワークのサイズ・重量・つかむ位置、加工できる工作機械の種類、ワークをつかむためのハンドの種類、など
3. 既存の工作機械をそのまま使いたい
解決のポイント③
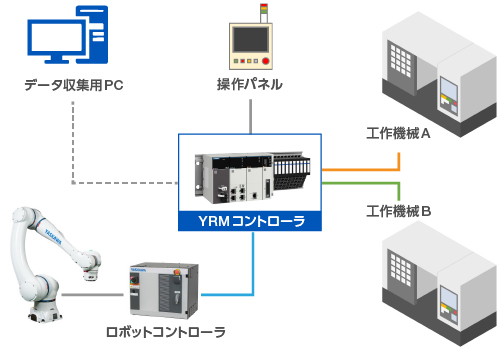
⇒YRMコントローラを使用して工作機械メーカーに依存せずロボットと連携
ロボットと工作機械を連携させた加工システムにするために、YRMコントローラを使用してシステム全体を統合制御しました。YRMコントローラは、当社のロボットはもちろん、様々なメーカーの工作機械との接続が可能※であり、既存の工作機械をそのまま使ったシステムを構築しやすくなっています。
※ 工作機械の通信仕様に対応したインターフェースを作成し、YRMコントローラに追加する必要があります。
今回ご紹介した製品に関するお問い合わせ、導入のご相談などは、
以下の特設サイトからお気軽にご連絡ください。
協働ロボットについて ⇒ 【もっと詳しく】人協働ロボットソリューションサイト

YRMコントローラについて ⇒ 【もっと詳しく】コントローラソリューションサイト



















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー この事例についてもっと詳しく!お問い合わせはこちら
この事例についてもっと詳しく!お問い合わせはこちら