ソリューションガントリ駆動に有効な4つの機能を内蔵したサーボパックΣ-X FT70で制御
ガントリ機構の制御に最適な4つの機能を備えたサーボパックΣ-X FT70により、ガントリ機構特有のお悩みを解決します。
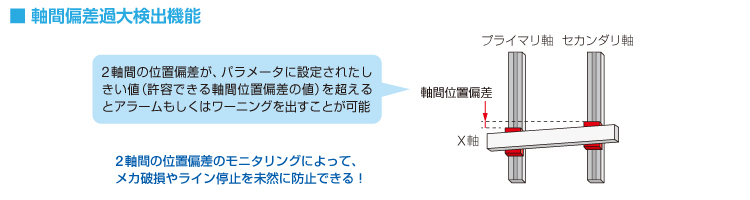
1. 軸間偏差過大検出機能
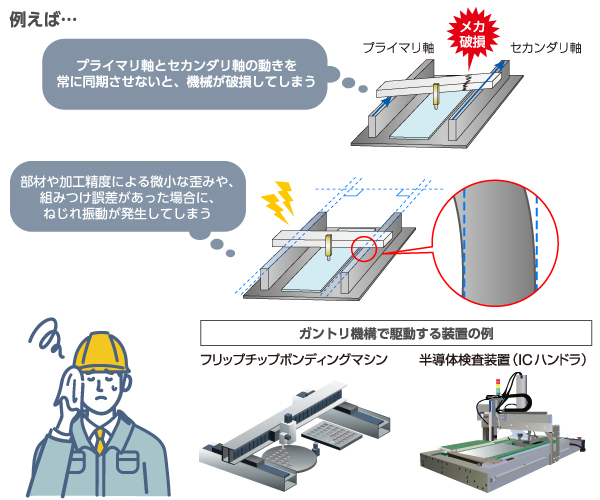
装置の故障等が原因で、プライマリ軸とセカンダリ軸の位置偏差が許容値を超えた場合、X軸がねじれてしまい、メカ破損やライン停止が発生するおそれがあります。
軸間位置偏差過大検出機能は、両軸間で許容できる位置偏差を事前に設定しておき、その許容値を超えたときにアラームおよびワーニングを発生することで、X軸のねじれを検出する機能です。
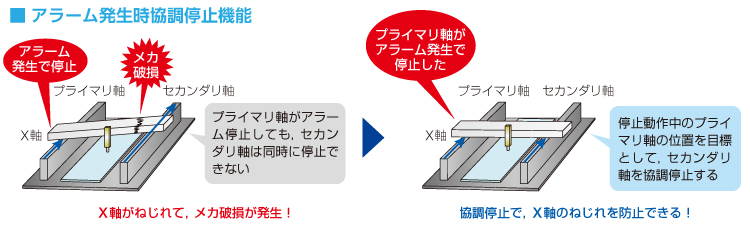
2. アラーム発生時協調停止機能
協調停止機能とは、プライマリ軸またはセカンダリ軸のどちらか一方に何らかのアラームが発生した場合に、アラームが発生した軸にもう一方の軸(協調停止軸)を同期させて、サーボモータが停止する機能です。
プライマリ軸がアラーム停止した場合に、セカンダリ軸が同時に停止できないと、X軸がねじれてメカ破損が発生してしまいます。
本機能を使用するとプライマリ軸とセカンダリ軸が同期して停止するので、X軸のねじれによるメカ破損を防ぐことができます。
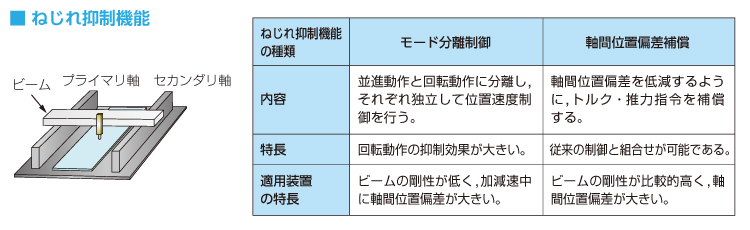
3. ねじれ抑制機能
高加減速動作時には、負荷の偏りや機械の組付け(スケール含む)誤差により、ねじれによる軸間位置偏差が発生します。これが大きくなるとメカ破損が発生するため、高加減速動作時の軸間位置偏差を抑制する必要があります。
また、応答性を高めるためにフィードバックゲインを高く設定すると、ガントリ機構のビームにより2軸が干渉し、ねじれ振動が発生します。応答性を高める場合は、ねじれ振動を抑制する必要があります。
本機能を使用すると、ねじれ振動や軸間位置偏差を低減することで、加減速時間が短縮され、位置決め精度が向上します。
ねじれ抑制機能には、モード分離制御機能と軸間位置偏差補償機能との2種類があります。
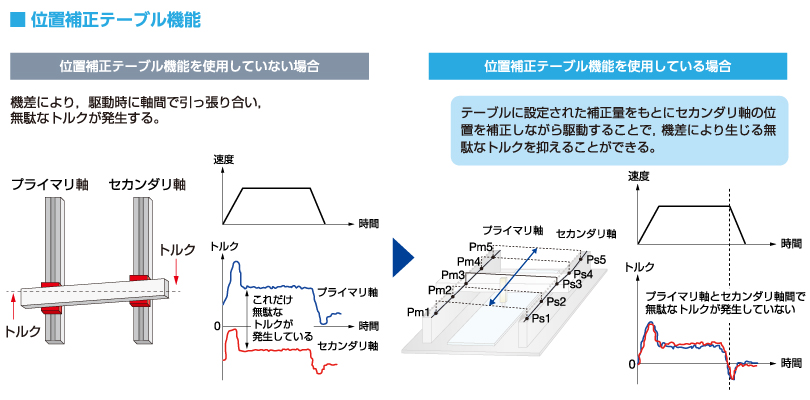
4. 位置補正テーブル機能
位置補正テーブル機能は、テーブルに設定された補正量をもとにして位置を補正しながら駆動することで、機差により生じる無駄なトルクを抑える機能です。
本機能を使用することで、2軸間に無駄なトルクを発生させず駆動できるため、サイクルタイムを短縮することができます。
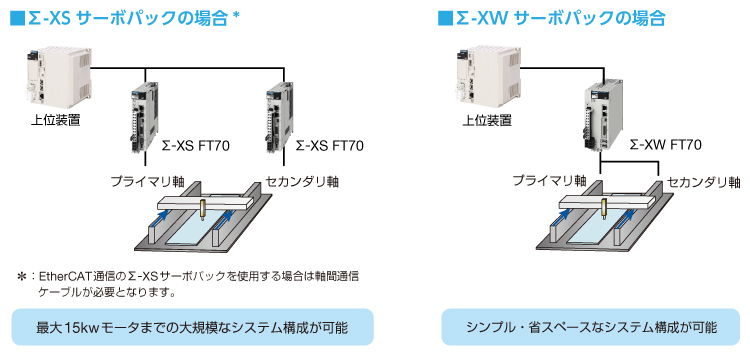
システム構成
Σ-X FT70は、単軸(Σ-XS)・2軸一体(Σ-XW)のラインアップを揃えており、柔軟なシステム構成が可能です。


















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー この事例についてもっと詳しく!お問い合わせはこちら
この事例についてもっと詳しく!お問い合わせはこちら