モータを動かせない状況でも慣性モーメント推定を実現
「慣性モーメント比∗」は、サーボのゲイン調整を行ううえで基準となるパラメータであり、設定が必要です。ACサーボドライブΣ-Ⅹは、その算出に必要な「負荷慣性モーメント」を推定する機能の強化により、可動部が密集してモータの動作範囲に制限があるような状況でも、モータを動かすことなく推定が実行できます。
∗慣性モーメント比:モータ慣性モーメントに対する負荷慣性モーメントの比
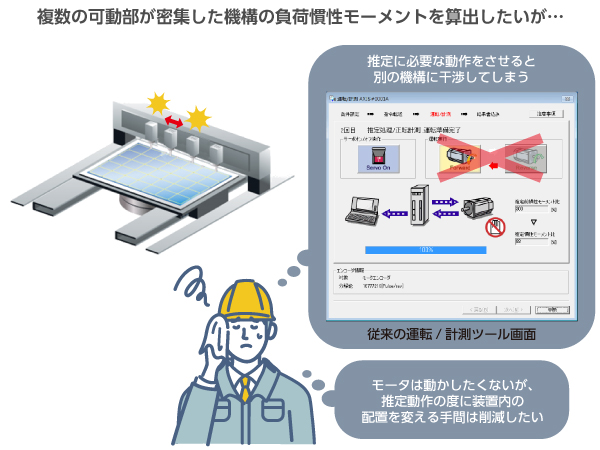
課題負荷慣性モーメントを推定したいが、可動範囲に制限がある状況では必要な動作ができない
負荷慣性モーメントはメカ各部の重量や構造から算出で求められるが、複雑なメカ構成では正確に求めることが困難である。
負荷慣性モーメントを推定するためには一定の正転動作と逆転動作をさせる必要があるが、例えば複数の可動部が密集しているような機構では、一つのモータを動かすと別の機構に衝突してしまうため、モータを動かしたくないという課題がある。
このように可動範囲に制限のある(干渉がある)状況では、干渉しないように装置内の可動部を移動させる手間と時間がかかっている。
ソリューションΣ-Ⅹの「周波数指令による計測」によってモータを動かさずに推定を実行
ACサーボドライブΣ-Ⅹは慣性モーメント推定アルゴリズムを進化させたことで、可動範囲に制限のある(干渉がある)状況であっても、モータを動かすことなく負荷慣性モーメントを推定できるようになりました。これまでのように装置内の他の可動部の干渉を避ける手間を削減できます。
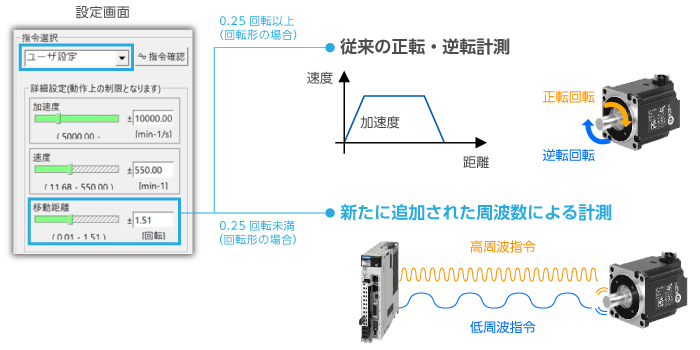
Σ-Ⅹでは、推定のためにモータを動かすことを前提とした従来の「正転・逆転計測」に加えて、推定実施の設定でモータの移動距離を0.25回転未満に設定すると、モータをほとんど動かさずに推定する「周波数指令による計測」を使用できます。
各モータを以下の一定の数値未満に設定すると、自動的に周波数指令による計測に切り替わります。
・回転形:0.25回転
・DD形:0.04回転
・リニア形:2.5mm
関連製品
分類
| 業界 | 自動車・自動車部品、液晶製造、金属加工、搬送装置、射出・成形、半導体製造、電気・電子、食品、蓄電池 |
|---|
| アプリケーション | 金属加工、組立、仕分け・梱包、搬送、検査・検出、成形 |
|---|
| テーマ | 高品質化、高精度化 |
|---|
| 製品 | サーボ |
|---|



















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー この事例についてもっと詳しく!お問い合わせはこちら
この事例についてもっと詳しく!お問い合わせはこちら