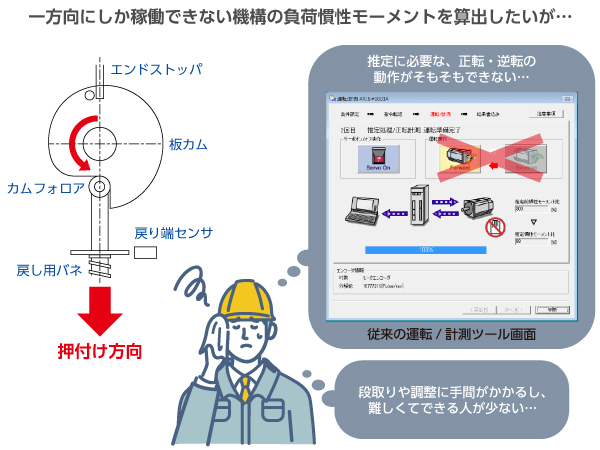
課題負荷慣性モーメントの推定動作ができない機構では、段取りや調整に手間がかかる
負荷慣性モーメントはメカ各部の重量や構成から計算で求められるが、複雑なメカ構成では正確に求めることが難しい。また、推定しようとしてもそのための動作ができない機構もあり、調整に手間と時間がかかっている。
例えば、負荷慣性モーメントを推定するためには機械を正転・逆転(往復動作)させる方法があるが、その往復動作自体ができない(一方向にしか可動できない)機構では慣性モーメントを推定できない。また、動摩擦が大きかったり位置決め動作で振動が発生したりして負荷が変動する機構では、負荷が安定しないため、正しい値を算出できないという問題もある。
そうした機構では、可動範囲の確認や調整、判断に手間と時間がかかり、サーボ調整が難しく感じる一因となっている。
ソリューション段取りの手間ゼロへ、自動調整を可能にする機能を強化
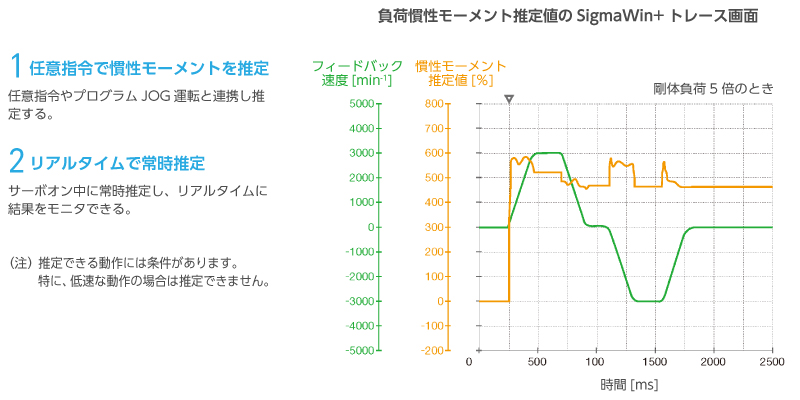
ACサーボドライブΣ-Ⅹの慣性モーメント推定アルゴリズムを進化させたことで、従来推定のための往復動作ができなかった機構や負荷変動のある機構でも負荷慣性モーメントを自動で推定でき、段取りや調整の手間を削減できます。
ACサーボドライブΣ-Ⅹは、慣性モーメント推定機能の強化により、従来の推定方法に加え2つの推定方法が可能になりました。
①指定した任意指令の動きで推定する方法
②生産の動きの中で負荷慣性モーメントをリアルタイムに推定する方法
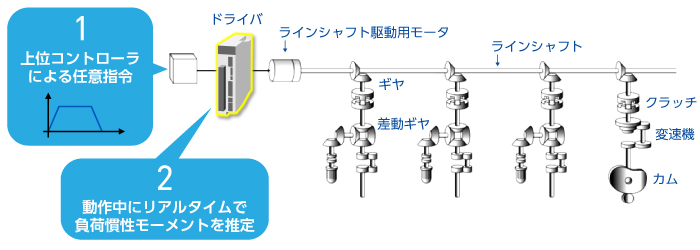
機構の性質などによって使い分けることもできます。例えば、往復動作ができない機構では①の方法を用い、正転のみの動きで推定します。また、負荷変動のある機構では、②の方法を採ることで、正しい値の目安が分かります。
また、負荷慣性モーメント推定値は、エンジニアリングツールSigmaWin+でモニタしたり、MECHATROLINK経由で上位コントローラに送信したりすることで、遠隔からでもモニタすることができます。


















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー この事例についてもっと詳しく!お問い合わせはこちら
この事例についてもっと詳しく!お問い合わせはこちら