プログラミングペンダントにて位置確認操作が必要です。
位置確認操作の詳細に関してはロボットコントローラ保守要領書の「第2原点の設定」をご参照ください。
*位置確認操作でロボットが動作しない場合は、
YASKAWAコンタクトセンタへご連絡ください。
■操作手順:
「位置確認」操作はロボットを第二原点位置に移動させる必要があります。操作の際にはロボットが周辺機器等と干渉しないよう確認を行いながら動作させてください。
➀コントローラを「ティーチモード」に設定します。
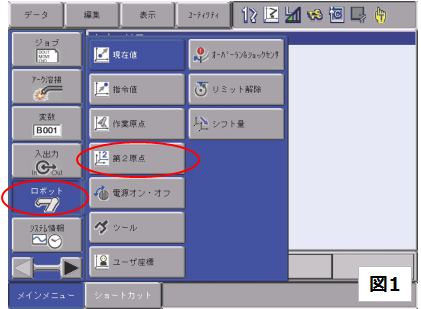
②プログラミングペンダントの画面より「メニュー」を選択し、【ロボット】→【第二原点】を選択し、「第2原点位置」画面を表示します。(図1)
③サーボ電源を投入し、プログラミングペンダントの「ネクスト」キーを押下して、すべての軸のパルス差が0になるまで移動させてください。
※「ネクスト」キーの動作で周辺機器と干渉する場合には各軸操作で回避してください
※速度と動作は、「手動速度」と「座標系」に依存します。
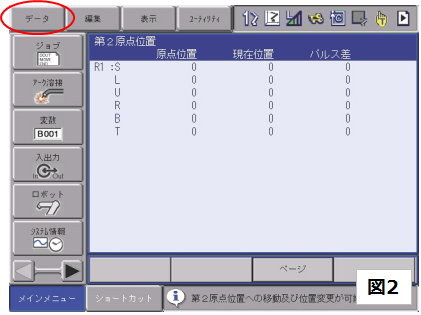
④画面上部のサブメニューより【データ】を選択し、【位置確認】を選択します。(図2)
⑤「位置確認操作が行われました」のメッセージがメッセージ欄に表示されましたら、作業完了です
※複数の制御グループが存在する場合には、操作手順2で対象の制御グループを表示し、操作手順⑤までを繰り返してください。
このメッセージが表示されるのは、制御電源オフと制御電源オンの時の絶対値エンコーダのアブソリュート回転量データが異なる場合に発生するアラームが発生したことを示しています。
安全性を確保するために、このアラーム発生後は「位置確認」操作を行わないとプレイバックやテスト運転ができないようになっております。

















 導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー