![]()
| ウィザード選定/機械諸元 |
機械諸元
選択した機構の機械諸元を入力します。
【操作手順】
【画面構成】
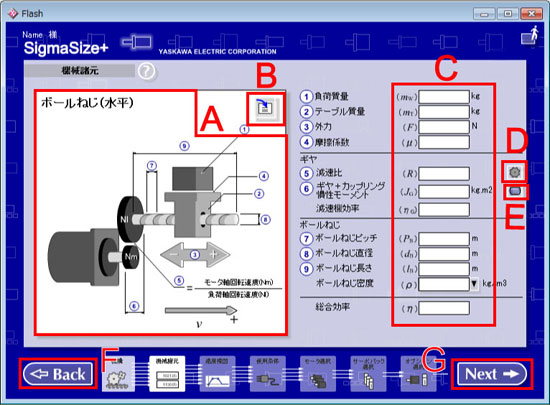
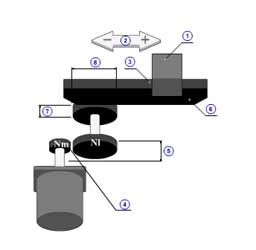
機械諸元画面(ボールねじ(水平))
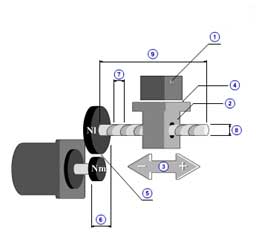
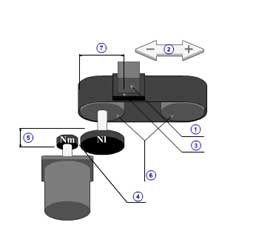
機構図
選択した機構を表示します。
データ読込ボタン
保存済みの機械諸元データがあれば、その値を読み込みます。
データを読み込んだ際は、設定済みの単位に換算されます。
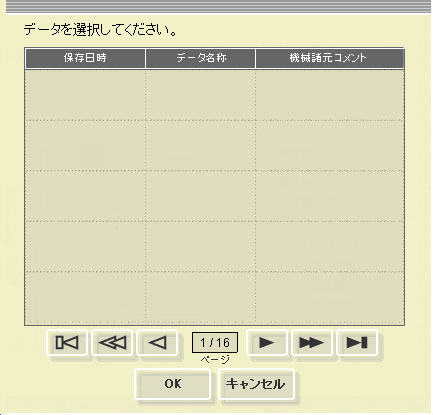
データ読込ダイアログ
データ入力欄
初めは全て空欄になっています。
データを読み込んだり、データが保持されている場合は、その値が表示されます。
なお、各入力項目の最大入力桁数は12桁(符号、小数点等含)です。
例
入力可 :1.0,-1.0,1.2345678912,-1.234567891,1.0e+100 等
入力不可:1.00000000000,-1000000000,1.23456789123,1.000000e+001 等
機構毎に入力すべき機械諸元と、軸換算慣性モーメント/必要トルク計算式を以下に示します。
| 回転形 |
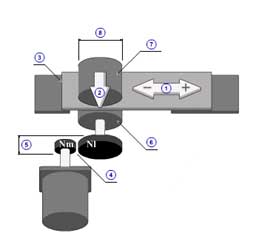
| ボールねじ(水平) |
| タイミングベルト(水平) |
| ラック&ピニオン(水平) |
| ボールねじ(垂直) |
| タイミングベルト(垂直) |
| ラック&ピニオン(垂直) |
| ロールフィード |
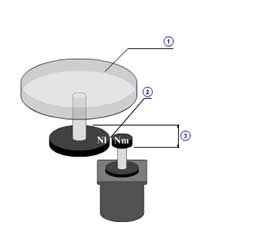
| 回転体 |
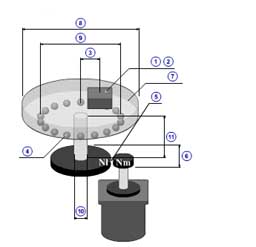
| 回転テーブル |
| リニア形 |
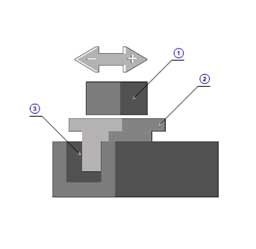
| リニア単軸(水平) |
減速機構計算ボタン
減速機構計算画面を開きます。
※減速比入力欄の横に表示します。
慣性モーメント計算ボタン
慣性モーメント計算画面を開きます。
※慣性モーメント入力欄の横に表示します。
Backボタン
機構画面に戻ります。
Nextボタン
速度線図画面に進みます。
| 定数 | |
| (標準)重力加速度 | g |
| 円周率 | π |
機械諸元以外の入力(モータ特性) | |
| 回転型モータ | |
| モータ回転子慣性モーメント | JM |
| モータオプション慣性モーメント | JMO |
リニアモータ | |
| モータ可動子質量 | mM |
|
1 | 負荷質量( mW ) |
| 2 | テーブル質量( mT ) | |
| 3 | 外力( F ) | |
| 4 | 摩擦係数( μ ) | |
| 5 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 6 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 7 | ボールねじピッチ( PB ) | |
| 8 | ボールねじ直径( dB ) | |
| 9 | ボールねじ長さ( lB ) | |
| ボールねじ密度( ρB ) | ||
| 総合効率( η ) |
| 摩擦力 | FFR | = μ ( mW + mT )g | (N) |
| 定常外力 | FC | = F | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (ボールねじ) | JMC | = π ρB lB dB4 / ( 32 R 2 ) | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = (mW + mT )( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = PB / R | (m/rev) | 回転子軸換算 トルク |
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
1 | 負荷質量( mW ) |
| 2 | 外力( F ) | |
| 3 | 摩擦係数( μ ) | |
| 4 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 5 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 6 | プーリ慣性モーメント( JP ) | |
| 7 | プーリ直径( dP ) | |
| 総合効率( η ) |
| 摩擦力 | FFR | = μ mW g | (N) |
| 定常外力 | FC | = F | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (プーリ) | JMC | = JP / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = mW ( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = π dP / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
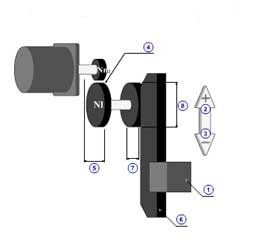
1 | 負荷質量( mW ) |
| 2 | 外力( F ) | |
| 3 | 摩擦係数( μ ) | |
| 4 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 5 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 6 | ラック質量( mR ) | |
| 7 | ピニオン慣性モーメント( JPIN ) | |
| 8 | ピニオン直径( dPIN ) | |
| 総合効率( η ) |
| 摩擦力 | FFR | = μ ( mW + mR )g | (N) |
| 定常外力 | FC | = F | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (ピニオン) | JMC | = JPIN / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = ( mW + mR )( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = π dPIN / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
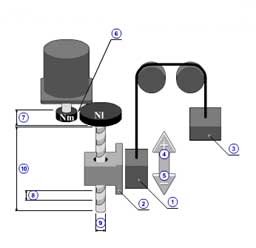
1 | 負荷質量( mW ) |
| 2 | テーブル質量( mT ) | |
| 3 | カウンタウェイト質量( mWC ) | |
| 4 | 上昇時垂直方向外力( FVU ) | |
| 5 | 下降時垂直方向外力( FVD ) | |
| 6 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 7 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 8 | ボールねじピッチ( PB ) | |
| 9 | ボールねじ直径( dB ) | |
| 10 | ボールねじ長さ( lB ) | |
| ボールねじ密度( ρB ) | ||
| 総合効率( η ) | ||
※参考
| ||
| 摩擦力 | FFR | = 0 | (N) |
| 定常外力(外力+重量差分) | FC | = - ( mW + mT - mWC )g | (N) |
| 正方向移動時外力 | FFW | = FVU | (N) |
| 負方向移動時外力 | FBW | = FVD | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (ボールねじ) | JMC | = π ρB lB dB4 / ( 32 R 2 ) | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = ( mW + mT + mWC )( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = PB / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = FFW Kvn / ( 2π ) | (N.m) |
| 負方向外力分トルク | TBW | = FBW Kvn / ( 2π ) | (N.m) |
|
1 | 負荷質量( mW ) |
| 2 | カウンタウエイト質量( mWC ) | |
| 3 | 上昇時垂直方向外力( FVU ) | |
| 4 | 下降時垂直方向外力( FVD ) | |
| 5 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 6 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 7 | プーリ慣性モーメント( JP ) | |
| 8 | プーリ直径( dP ) | |
| 総合効率( η ) |
| 摩擦力 | FFR | = 0 | (N) |
| 定常外力(外力+重量差分) | FC | = - ( mW - mWC )g | (N) |
| 正方向移動時外力 | FFW | = FVU | (N) |
| 負方向移動時外力 | FBW | = FVD | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (プーリ) | JMC | = JP / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = ( mW + mWC )( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = π dP / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = FFW Kvn / ( 2π ) | (N.m) |
| 負方向外力分トルク | TBW | = FBW Kvn / ( 2π ) | (N.m) |
|
1 | 負荷質量( mW ) |
| 2 | 上昇時垂直方向外力( FVU ) | |
| 3 | 下降時垂直方向外力( FVD ) | |
| 4 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 5 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 6 | ラック質量( mR ) | |
| 7 | ピニオン慣性モーメント( JPIN ) | |
| 8 | ピニオン直径( dPIN ) | |
| 総合効率( η ) |
| 摩擦力 | FFR | = 0 | (N) |
| 定常外力(外力+重量差分) | FC | = - ( mW + mR )g | (N) |
| 正方向移動時外力 | FFW | = FVU | (N) |
| 負方向移動時外力 | FBW | = FVD | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (ピニオン) | JMC | = JPIN / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = ( mW + mR )( Kvn / 2π )2 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = π dPIN / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = FFW Kvn / ( 2π ) | (N.m) |
| 負方向外力分トルク | TBW | = FBW Kvn / ( 2π ) | (N.m) |
|
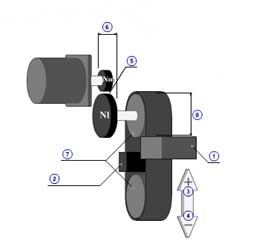
1 | テンション( F ) |
| 2 | プレス圧( FP ) | |
| 3 | 摩擦係数( μ ) | |
| 4 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 5 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 6 | 駆動側ローラ慣性モーメント( JR1 ) | |
| 7 | 従動側ローラ慣性モーメント( JR2 ) | |
| 8 | 駆動側ローラ直径( dR ) | |
| 総合効率( η ) | ||
※参考
| ||
| 摩擦力 | FFR | = μ FP | (N) |
| 定常外力 | FC | = F | (N) | 回転子軸換算 慣性モーメント |
| 機構部(分)慣性モーメント (ローラ) | JMC | = ( JR1 + JR2 ) / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = 0 | (kg.m2) |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = π dR / R | (m/rev) |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = FFR Kvn / ( 2π ) | (N.m) |
| 定常トルク | TC | = FC Kvn / ( 2π ) | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
1 | 負荷慣性モーメント( JWL ) |
| 摩擦トルク( TFL ) | ||
| 2 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 3 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 総合効率( η ) |
| 機構部(分)慣性モーメント (回転体) | JMC | = JWL / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = 0 | (kg.m2) | 回転子軸換算 慣性モーメント |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = 1 / R | |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = TFL Kvn | (N.m) |
| 定常トルク | TC | = 0 | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
1 | 負荷慣性モーメント( JWL ) |
| 2 | 負荷質量( mWL ) | |
| 3 | 負荷重心の回転半径( rWL ) | |
| 4 | 摩擦係数( μ ) | |
| 5 | 減速比( R ) ( = モータ回転数(Nm) / 負荷軸回転数(Nl ) ) | |
| 6 | ギヤ+カップリング慣性モーメント( JG ) | |
| 減速機効率( ηG ) | ||
| 7 | 回転テーブル質量( mT ) | |
| 8 | 回転テーブル直径( dT ) | |
| 9 | 支持部直径( dF ) | |
| 10 | 回転テーブル軸 直径( dS ) | |
| 11 | 回転テーブル軸 長さ( lS ) | |
| 回転テーブル軸 密度( ρS ) | ||
| 総合効率( η ) |
| 機構部(分)慣性モーメント (テーブル+軸) | JMC | = (π ρS lS dS4 / 32 + mT dT2 / 8 ) / R 2 | (kg.m2) |
| 負荷質量分慣性モーメント | JW | = ( JWL + mWL rWL2 ) / R 2 | (kg.m2) | 回転子軸換算 慣性モーメント |
| (総)負荷慣性モーメント | JL | = JMC + JG + JW | (kg.m2) |
| 総合慣性モーメント | JA | = JL + JM + JMO | (kg.m2) |
| * | Kvn | = 1 / R | |
回転子軸換算 トルク | |||
| 摩擦分(負荷)トルク | TFR | = μ ( mWL + mT )g ( dF / 2 ) Kvn | (N.m) |
| 定常トルク | TC | = 0 | (N.m) |
| 正方向外力分トルク | TFW | = 0 | (N.m) |
| 負方向外力分トルク | TBW | = 0 | (N.m) |
|
1 | 負荷質量( mW ) |
| 2 | テーブル質量( mT ) | |
| 3 | 摩擦力( FFR ) | |
| 推力マージン( KM ) | ||
| 総合効率( η ) | ||
|
※摩擦力( FFR ) 摩擦力には、摩擦係数を考慮した以下の推力を含めます。 1.リニアガイドなどの機械部分の摩擦係数を考慮した負荷必要推力 2.リニアガイドなどの機械部分の摩擦係数を考慮したリニアモータ可動子質量分必要推力 3.リニアガイドなどの機械部分の摩擦係数を考慮したコア付きリニアモータの吸引力分必要推力 ※推力マージン( KM ) 機械の構造上、加減速時に必要な推力の増加を想定した 1 以上の系数です。 可動子と負荷重心の距離によるモーメントや可動部の剛性等により異なります。 通常の利用の場合 KM = 1.1 ~ 1.2 となることが多いようです。 質量m、加速度aの時、加減速推力は F = KM m a として計算されます。 | ||
| (総)負荷質量 | mL | = mW + mT | (kg) |
| 総合負荷質量 | mA | = mL + mM | (kg) |
| 区間 | i | = 1 .. n | |
| 区間 終了時間 | ti | (s) | |
| 区間 到達速度 | vi | (m/s) |
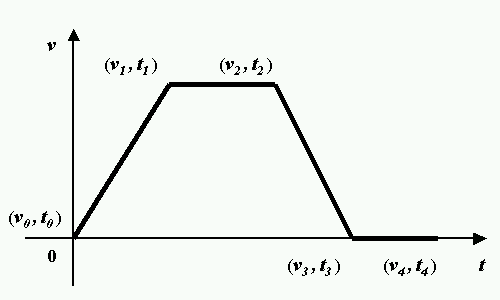 |
| 速度線図の例 |
| 区間 回転子 到達回転速度差 | nMdi | = ( vi - vi-1 ) / Kvn | (s-1) |
| 区間加速トルク | TAi | = JA ( 2π nMdi / ( ti - ti-1 ) ) | (N.m) |
| 区間必要トルク | Ti | (N.m) | |
| 正転時 ( nMi > 0 または nMi = 0, nMi-1 > 0 ) | Ti | = TAi - TC - TFW + TFR | (N.m) |
| 逆転時 ( nMi < 0 または nMi = 0, nMi-1 < 0 ) | Ti | = TAi - TC - TBW - TFR | (N.m) |
| 停止時 ( nMi = 0) | |||
| | TC | > TFR | |||
| TC > 0 | Ti | = - TC + TFR | (N.m) |
| TC < 0 | Ti | = - TC - TFR | (N.m) |
| | TC | <= TFR | Ti | = 0 | (N.m) |
| 実効トルク | TRMS | = √( Σ ni=1 Ti 2 ( ti - ti-1 ) / tn ) | (N.m) |
| | |||
| 必要推力 ( リニアモータの場合 ) | |||
| 区間加速推力 | FAi | = KM mA ( vi - vi-1 ) / ( ti - ti-1 ) | (N) |
| 区間必要推力 | Fi | (N) | |
| 正方向 (vi > 0 または vi = 0, vi-1 > 0 ) | Fi | = FAi + ( FFR / η ) | (N) |
| 負方向 (vi < 0 または vi = 0, vi-1 < 0 ) | Fi | = FAi + ( - FFR / η ) | (N) |
| 停止時 (vi = 0, vi = 0 ) | Fi | = 0 | (N) |
| 実効推力 | FRMS | = √( Σ ni=1 Fi 2 ( ti - ti-1) / tn ) | (N) |
| 目次 |