導入サポートを受けたい
導入サポートを受けたい 改造更新を検討したい
改造更新を検討したい 故障復旧サポートを受けたい
故障復旧サポートを受けたい 生産中止機種のサポートに
生産中止機種のサポートに 保守・保全サービスを受けたい
保守・保全サービスを受けたい YASKAWAシステムインテグレーションパートナー
YASKAWAシステムインテグレーションパートナー



装置の予防保全や生産品質向上のためには、まず装置から様々なデータを収集することが必要です。しかしその際、収集することばかりに目が行きがちで“収集するデータの質(細かさ、時間軸など)”や“上位コントローラの処理負荷”は見落とされがちです。今回は、そうしたデータ収集の課題をカバーできる、センシングデータのカスタマイズ機能を備えたサーボパックを紹介します。
データ収集と処理をサーボパックで実行
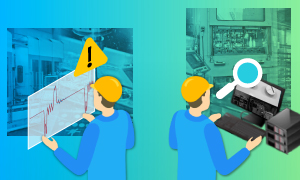
一般的に、装置で発生するデータは、コントローラやさらに上位のシステムに集められます。しかし、収集できるデータはコントローラの制御周期(ms単位)に依存してしまうため、精度の高さを期待したい品質関連のデータ収集に制約を受けることとなります
さらに、装置の稼働状態や、生産品質の状態を示す膨大な量のデータの収集・分析処理によって制御周期が長くなり、既存のモーション制御性能に影響が出てしまうという課題と隣り合わせになります。
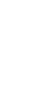
こうした課題を解決するため、当社では標準品のサーボパックに、装置や用途に応じた最適な機能を追加した「FT仕様」をラインアップしています。今回のようなデータ収集の課題解決においては、サーボドライブ内でセンシングデータの収集・一次解析を行うことができるサーボパック(FT55仕様)、モーション制御へのフィードバックも行うことができるサーボパック(FT56仕様)が最適です。

処理能力アップのために装置を構成するコントローラを更新しようとすると、その費用が追加でかかってしまいますよね。
FT55/FT56仕様サーボパックの3つの特長
FT55/FT56仕様は、ユーザーがサーボパック内にアプリケーション(プログラム)を組むことができます。これにより、3つの特長を実現しました。
①μs周期での高精度なデータ収集とコントローラの負荷分散 - センシングデータカスタマイズ機能(FT55/FT56仕様共通)-
コントローラの周期では実現の難しいμs周期(最速125μs~)でセンシングデータを収集することができます。
データ分析はサーボパックのアプリケーションに基づき実行、コントローラは分析結果を受け取るだけとなり処理負荷が軽減されます。
※センシングデータには、位置/速度/トルクに関するデータ、サーボモータやサーボパックの稼働状態のデータに加え、センサーネットワークΣ-LINKⅡに接続された外部センサーからのデータがあります。
②他のサーボパックの位置情報や稼働状態に基づいた高度なデータ分析 - 機器(サーボパック)間データ共有機能(FT55/FT56仕様共通) -
同じMECHATROLINK-4ネットワークに接続された他の軸(FT55/FT56仕様)のセンシングデータを、伝送周期ごとに共有できます。
これにより自軸だけではなく、他軸を含めたより高度なセンシングデータの解析が可能となります。
③収集・分析したデータに基づく自律的なモーション制御実行 - カスタムモーション機能(FT56仕様のみ) -
サーボ内のユーザーアプリケーションから直接モータを制御することができます。
サーボが自律して動作することで上位コントローラの処理負荷を軽減するとともに、コントローラの処理周期やネットワークの遅延に依存しない高速なモーション制御が行えます。
FT55/FT56が実際の場面でどのように役立つのか、次章の事例でイメージをつかんでいただければ幸いです。活用の幅がある製品なので、ぜひ最適なデータ活用方法を見つけてくださいね。
導入で改善が期待されるシステム例
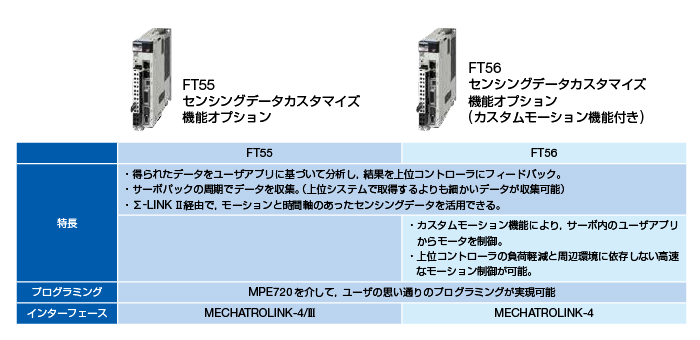
試験、検査工程全般 (FT55仕様)
データに基づくモーション制御が必要ない測定や検査工程の場合には、FT55仕様サーボパックが最適です。
例えば、レーザー測長機のセンサー情報(Σ-LINKⅡ経由)とモータエンコーダの位置情報との時間軸が合った、高精度な(125μs~周期)データに基づく解析をサーボパック単独で実行でき、結果のみを上位に通信する負荷分散システムが実現します。
さらに、機器間データ共有機能を活用すれば、複数軸から得られるデータを用いた複雑な分析も実行することができます。
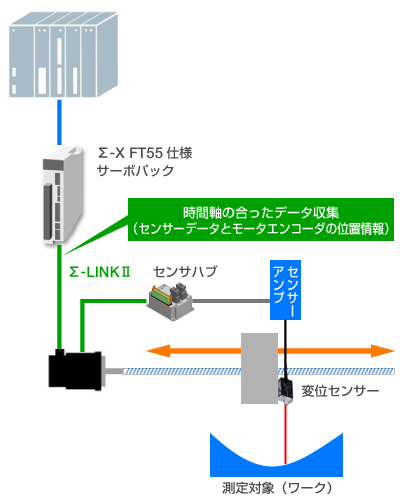
衝突検知後の停止、退避動作によるダメージ軽減 (FT56仕様)
衝撃にデリケートなワークを搬送している際、接触を検知次第、直ちに停止もしくは安全位置に退避させる動作を行います。
コントローラを経由しない分、速く動作するためワーク・機構のダメージ軽減や品質の安定に繋がります。
振動抑制位置決めのコントローラ処理負荷軽減 (FT56仕様)
振動の影響を避けたい装置では、コントローラ側で制振制御のプログラムを作成し、サーボパックに指令をすることがありますが、コントローラ側の処理負荷増によって制御周期が伸びてしまう傾向があります。
ここにFT56仕様のサーボパックを適用し、処理させることで負荷軽減につながります。対象の軸数が多いほどコントローラの負荷軽減効果は大きくなります。
(例)基盤実装装置のマウンタ軸に適用しヘッドの揺れを抑える。基板検査装置の検査軸に適用しテスターやカメラの揺れを抑える場合など。
製品や適用例についての詳細や疑問点については、ページ下のお問い合わせフォームからぜひお気軽にご相談ください。

解説のポイント
- データ処理が上位コントローラに集中するとモーション制御の性能に影響がでる恐れがある。
- サーボパック側で処理することで、コントローラでは実現が難しい精度(μs単位)でのデータ収集・分析と負荷分散が同時に実現する。
- 収集・分析したデータを基にしたモーション制御によって品質や生産性を高めることができる。